
Unités et systèmes de
protection électrique
Ceci
est un article long et descriptif sur différents types de protection pour les
systèmes électriques et les réseaux. Dans cet article, vous serez en
mesure de couvrir les différentes méthodes de protection électrique, le système
et les appareils, le calibrage et la protection, la protection des lignes
aériennes, la protection du réseau électrique, la protection des câbles, la
protection des transformateurs, protection de barre, protection de tension et
de fréquence et beaucoup plus. Marquer cet article au cas où pour lire
plus tard.
Table des
matières
Introduction
aux systèmes de protection électrique
Les installations et
équipements électriques HV, MV et LV [1] sont
soumis à des défauts internes et externes susceptibles de
provoquer de graves dommages aux personnes et
aux autres équipements .
Pour éviter
et de minimiser les conséquences de ces défauts des dispositifs
de protection associés à des équipements qui sont
en mesure de briser le courant électrique sont
obligatoires.
Pour
une meilleure compréhension des dispositifs de protection, à chaque section qui
couvre les systèmes de protection des équipements et des installations les
défauts les plus courants sur ces équipements et installations.
Il est
également important de mentionner que toutes les unités de paramètres
mécaniques et électriques et leurs multiples et sous - multiples qui
sont impliqués dans les systèmes de protection sont conformes
à SI ( Internation Units System ); des
exceptions sont faites quand les heures (h) peuvent être
utilisées au lieu de secondes( s )
et l' unité choisie pour la température est ° C ( celsius ) au
lieu de K ( kelvin ) - [K] =
[° C] + 273.15 .
Dispositifs
de protection et technologie

Dispositifs de
protection
Afin
de minimiser le temps de panne, les appareils de coupure et
les équipementssont équipés de dispositifs de protection pour
les détecter et isoler la partie défectueuse de l'installation.
Il faut
d'une part, la détection précoce et la localisation des défauts ,
et d'autre part, la mise hors service rapide des équipements
défaillants, afin de:
·
Protéger
l'ensemble du système pour assurer la continuité de l'approvisionnement.
·
Pour
minimiser les dommages et les coûts de réparation.
·
Pour
assurer la sécurité du personnel.
Dans le
passé, les fusibles étaient couramment utilisés comme
protection contre les surintensités et les surcharges, et sont toujours très
populaires en Amérique du Nord et dans certains pays, ils sont
encore utilisés dans les installations BT et dans les transformateurs
MT avec une puissance nominale de 630-1250 kVA .
Cependant,
la complexité des réseaux et les exigences d' une transmission
et d'une distribution d'énergie plus fiables exigent
l'utilisation de dispositifs de protection plus précis .
Les
relais de protection sont
utilisés de nos jours, étant plus fiables et précis et capables
de détecter d'autres types de défauts que les surcharges et surintensitéspouvant
survenir dans les réseaux et équipements , qui seront discutés
dans d'autres sections, lorsque la protection des équipements sera analysée.
Ils
sont configurés pour fonctionner et déclencher le déclenchement lorsqu'une
condition de défaut est détectée.
Chaque
schéma de protection du système d'alimentation est composé des composants
suivants:
·
Relais
de détection ou de mesure de défaut
·
Déclenchement
et autres relais auxiliaires
·
Transformateurs
de mesure - courant ( CT ) et tension ( VT )
Les
premiers modèles de relais
de protection sont des relais électromécaniques qui sont
encore en usage dans certains pays et dans les anciennes installations de câblage électrique qui
ne sont pas soumis à renoval œuvres .
Ils ont
été attirés types d'armature , où la sortie secondaire
des transformateurs d'instrument est passée à travers une bobine , attirant ainsi l'induit
contre la tension du ressort . Le mouvement de l'induit
provoque la fermeture du contact de déclenchement du relais .
La
figure 1 montre un exemple de ce type de relais.
Figure 1 - Relais de protection électromécanique
De nos
jours, les relais de protection électroniques (à semi-conducteurs) et à
microprocesseur sont couramment utilisés dans les services
d'électricité.
Les
relais électroniques ont une seule fonction
de protection et différents relais doivent être utilisés pour
différentes fonctions .
Les
relais à microprocesseur disposent de nombreuses fonctionnalités telles
que la protection, le contrôle et la surveillance.
Appareils
électroniques intelligents (IED)
Les
relais à microprocesseur sont connus sous le nom de dispositifs
électroniques intelligents ( IED ), qui peuvent
fournir 5 à 12 fonctions de protection , 5
à 8 fonctions de contrôle contrôlant des dispositifs séparés, une
fonction de réenclenchement, une fonction de surveillance automatique et des
fonctions de communication .
·
De
nombreuses fonctions dans un seul relais
·
Paramètres
de groupe facilement modifiables pour les modifications de la configuration du
chargeur
·
Relais
de sortie programmables
·
Ports
de communication pour la connexion à SCADA - Contrôle de supervision et
acquisition de données (systèmes, modems et ordinateurs
personnels)
·
Séquence
d'événements stockée pour de nombreuses failles récentes
·
Oscillographie
ou capture de forme d'onde - stockage des données de forme d'onde de courant et
de tension avant et après la défaillance pour l'analyse des défauts
·
Des
mesures
·
Interverrouillage
·
Aide à
la maintenance du disjoncteur. Le défaut d'interruption, par phase, peut
être enregistré
·
Fault
Locater - Affiche la distance à l'erreur

Figure 2 - IED
Les
fonctions et la complexité du DEI doivent être définies en
fonction de l'équipement à protéger, des caractéristiques du réseau et des
actions complémentaires requises.
Les DEI
actuels sont conçus pour satisfaire aux exigences de la norme CEI [2] 61850 , protocole
de communication utilisé. Cette norme a été spécialement
développée pour l' automatisation des postes et
fournit des capacités d'interopérabilité et de communication avancées.
L'augmentation
du nombre de points de protection, de contrôle et de surveillance entraîne une
augmentation significative du volume de données sur les postes.
Ces
données sont généralement primitives et stockées sous forme numérique. Il
doit être traité et analysé avant tout utilisateur est en mesure d'utiliser
l'avantage de celui-ci.
Dans le
système de protection classique, les données et le signal de commande du relais
sont envoyés via une unité RTU ( Remote
Terminal Unit ) au système SCADA .
Des
câbles extensifs et coûteux peuvent être requis entre les différentes baies
de la sous-station et la salle de contrôle.
Dans un
système de protection moderne utilisant un relais IED ,
le câblage d'interconnexion entre les transducteurs et les compteurs n'est plus
requis.
Les
signaux de données et de contrôle du relais IED sont
envoyés directement au système SCADA via le réseau de communication dédié haute
vitesse . Le volume de données augmente considérablement
lorsqu'un IED est utilisé comme élément de contrôle et source
de données.
Pour
fournir la connectivité nécessaire entre les divers composants du système, un
réseau de données LONWORKS Local Operating Network ( LON )
est utilisé.
La
norme CEI 61850 définit
les protocoles de communication requis , qui peuvent
fonctionner sur des réseaux TCP / IP ou
des sous-stations LAN en utilisant Ethernet commuté haute
vitesse pour obtenir les temps de réponse nécessaires en dessous de
quatre millisecondes pour le relais de protection.
Relais de protection
et codes
Dans les
sous-stations MT et HT, les équipements, les appareillages de commutation et
les centrales électriques, les relais de protection les
plus courants sont indiqués ci-dessous, et entre les crochets
leur code est indiqué conformément aux normes IEEE / ANSI [3] /
IEC :
·
Protection
de palier ( 38 )
·
Protection
contre les défaillances du disjoncteur ( 50 BF )
·
Protection
différentielle de barres omnibus ( 87B )
·
Surintensité
de terre directionnelle ( 67N / 67G )
·
Surintensité
de phase directionnelle ( 67 )
·
Surintensité
instantanée de la terre ( 50N / 50G )
·
Surintensité
de phase instantanée ( 50 )
·
Perte
de champ / protection d'excitation ( 40 )
·
Perte
de phase ( 48 )
·
Protection
contre l'excitation ( 24 )
·
Surfréquence
et sous-fréquence ( 81 )
·
Protection
différentielle de ligne aérienne ( 87L )
·
Protection
de distance de ligne aérienne ( 21 )
·
Protection
contre les surcharges ( 49 )
·
Protection
contre la survitesse ( 12 )
·
Surtension
( 59 )
·
Défaut
à la terre restreint ( 64G / 64REF )
·
Protection
de puissance inverse ( 32 )
·
Surintensité
de terre à temporisation ( 51N / 51G )
·
Surintensité
de phase temporisée ( 51 )
·
Protection
différentielle de transformateur ( 87P )
·
Sous-tension
( 27 )
·
Faible
fin d'alimentation ( 21WI )
·
Mauvaise
protection de la séquence de phase ( 47 )
Principalement
dans les lignes aériennes HT, les transformateurs de puissance HT et
les transformateurs de puissance MT avec une puissance nominale
supérieure à 3-4 MVA , afin d'augmenter la fiabilité et la
sécurité du système, est une pratique courante d'utiliser deux protections:
une " protection principale " et
une " protection de secours " .
Protection avec des
fusibles
Un fusible est un type de résistance à
faible résistance qui agit comme un «dispositif
sacrificiel» pour fournir une protection contre les
surintensités qui est encore utilisée dans certaines installations
BT et MT .
Son
composant essentiel est un fil métallique ou une bande qui
fond lorsque trop de courant circule , ce qui interrompt le
circuit, de sorte que d'autres dommages par surchauffe ou incendie sont évités.
La bande
de métal ou le fil comme une petite section transversale par
rapport aux conducteurs du circuit et est entouré par un boîtier
incombustible ( boîtier) .
L' élément
de fusible est fait de zinc, de cuivre, d'argent, d'aluminium
ou d'alliages pour fournir des caractéristiques stables et
prévisibles.
Le
boîtier peut
être en céramique, en verre, en plastique, en fibre de verre, en
stratifié de mica moulé ou en fibre comprimée moulée selon le
fabricant, l'application et la classe de tension.
Les
fusibles sont montés sur des porte-fusibles , spécialement
conçus pour chaque type ou famille de fusibles et de tensions nominales
telles que le fusible HRC .


Figure 4 - Fusibles MT et support
Les
principales caractéristiques électriques des fusibles sont:
·
Tension
nominale
·
Courant
assigné ( I n ): courant maximum que le
fusible peut conduire en continu sans interrompre le circuit.
·
Pouvoir
de coupure ( I 1 ): courant maximal potentiel
que le fusible peut interrompre. C'est la valeur maximale du test du
fusible. Ce courant est très élevé, généralement compris entre 20
kA et 63 kA .
·
Courant
de coupure minimum ( I f ): courant minimum
pouvant souffler et interrompre le fusible
·
Courant
non- fusible conventionnel ( I nf ):
valeur du courant spécifiée comme celle que le fusible est capable de porter
pendant une durée spécifiée (temps conventionnel) sans fusion,
exprimée en multiple de I n (par exemple I nf =
1,25 x I n)
·
Fusion
nominale ( I 2 t ): mesure de l'énergie
nécessaire pour faire fondre l'élément de fusion (basée sur la loi
Joule ) et est une valeur constante pour chaque élément de fusion.
·
Courbe
temps-courant: montre le temps d'activation du fusible (vitesse) en fonction du
courant (est généralement indiqué par les fabricants, selon les normes)
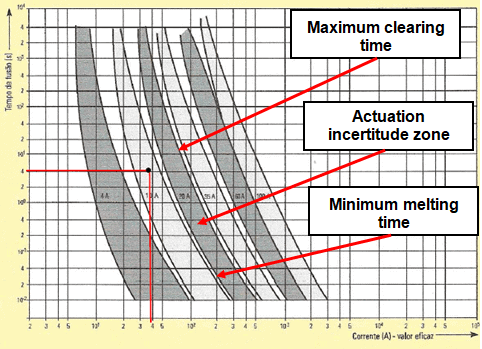
Figure 5 - Fusible courbe temps-courant
La
température ambiante modifie les paramètres opérationnels d'un fusible et un
déclassement de la température est nécessaire.
À titre
d'exemple, un fusible de 1 A à 25 ºC peut
entraîner jusqu'à 10% ou 20% decourant en plus à -40 ºC et
peut s'ouvrir à 80% de sa valeur nominale à 100 ºC .
Les
valeurs de fonctionnement varient avec chaque famille de fusibles et sont
fournies dans les fiches techniques du fabricant.
Les
principaux facteurs de sélection d'un fusible sont:
·
Courant
de fonctionnement normal
·
Tension
nominale (AC ou DC)
·
Température
ambiante
·
Courant
de surcharge et durée d'ouverture du fusible
·
Courant
de défaut maximum disponible
·
Impulsions,
courants de surintensité, courants d'appel, courants de démarrage et
transitoires du circuit
·
Limites
de taille physique, telles que la longueur, le diamètre ou la hauteur
·
Caractéristiques
des fusibles (type de montage / facteur de forme, facilité de retrait, câbles
axiaux, indication visuelle, etc.)
·
Caractéristiques
du porte-fusible, le cas échéant, et réitération associée
·
Application
·
Normes
et normes de câblage nationales
La
norme française NF EN 60269 classe les fusibles en fonction des courbes
temporelles, des fonctions et des applications. Cette classification,
largement utilisée dans de nombreux pays, est:
·
gL / gG
·
Les fonctions
·
Protection
des câbles et des appareils électriques. Discrimination assurée entre deux
fusibles ou avec une marge de deux courants nominaux (par exemple 160 A et 100
A)
·
Applications
·
Protection
à tous les niveaux de la distribution d'énergie électrique dans les industries et les résidences
contre les surcharges et les courts-circuits. Tableau principal, tableaux
de distribution, compartiments principaux.
·
un m
·
Les fonctions
·
La
protection directe des moteurs doit fonctionner conjointement avec un
dispositif de protection externe (relais thermique). Discrimination facile
avec les fusibles gGpositionnés en amont. Discrimination
assurée entre deux fusibles où il y a une marge de deux courants nominaux (par
exemple 160 A et 100 A)
·
Applications
·
Protection
des moteurs basse tension.
·
gR
·
Les fonctions
·
Fusible
de protection ultra-rapide pour semi-conducteurs, limitation très actuelle,
faible l 2 xt
·
Applications
·
Protection
semi-conductrice de puissance des démarreurs progressifs, des relais statiques,
des alimentations sans interruption (ASI), des variateurs de vitesse, de la
fréquence
Lorsqu'une
installation est protégée par des fusibles, des interrupteurs-sectionneurs
en amont des fusibles doivent être utilisés pour des raisons de
sécurité , pour assurerl' isolation de
l'installation avant de remplacer un fusible ou d'effectuer des
travaux de maintenance .
Avec
une protection uniquement avec des fusibles , seules
les surintensités de phase seront détectées et il est nécessaire
de prévoir des relais de protection pour d'autres défauts . Pour
un courant de fuite ou un courant de défaut à la terre , un disjoncteur de fuite
à la terre (GFCI) est
utilisé.
Dans
cette situation, les interrupteurs doivent être équipés d'une
bobine d'ouverture , qui sera également actionnée par
la protection interne des équipements .
Une
autre précaution est que les fusibles doivent être munis
d'un dispositif mécanique ( gâche ) qui
entraînera l' ouverture de l' interrupteur ,
si un seul fusible est activé , pour assurer la déconnexion
totale de l'installation en défaut .
Les
fusibles doivent
également être munis d'un disque coloré qui tombe
lorsque l'élément est soufflé ou d'une fenêtre d'élément, intégrée dans le
corps du fusible pour fournir une indication visuelle d'un élément soufflé .
Coordination de
classement et de protection
Introduction au
classement et à la protection
Lors de
la définition des points de consigne des relais de protection ou courant
nominal des fusibles et des disjoncteurs basse tension (tels
que ACB (Breaker Air Circuit) ) , il
doit être assuré que les valeurs choisies sont appropriés pour la
protection de l'équipement et que le disjoncteur qui déclenche
ou le fusible qui va souffler est seulement celui associé au
circuit défectueux et pas d'autres dispositifs de protection , ce qui
pourrait causer de graves perturbations dans le réseau et dans
la qualité et la continuité du service .
Pour
atteindre cet objectif, une étude de coordination de classification et
de protection est requise.
Principes de base
Des
études de coordination de relais de protection sont entreprises
pour déterminer les réglages du relais de protection .
Les
niveaux de défaut doivent
être déterminés pour toutes les conditions de
fonctionnement du système , ceci étant utilisé pour déterminer
la capacité des relais de protection à détecter et à
effacer les défauts du système .
Les schémas
de protection sont réglés de manière à isoler le
moins possible le système électrique , minimisant ainsi les
perturbations causées par le défaut .
Les
temps de dégagement des relais de protection sont déterminés pour répondre aux exigences
de courte durée de l'installation primaire, aux exigences de stabilité des
systèmes et aux exigences légales . Nous prenons soin de
déterminer les marges de fonctionnement correctes du relais de protection, à
la fois en temps et en heure , afin d'éliminer efficacement
les dégradations.
Lors
du réglage des relais de distance sur les alimentations haute tension à
double circuit, le couplage mutuel homopolaire entre les
circuits est pris en compte de manière à minimiser la
possibilité de sur-ou sous-dépassement .
Les
caractéristiques de fonctionnement du relais et leur réglage doivent être
soigneusement coordonnés afin d'atteindre la sélectivité .
Le but
est essentiellement d'éteindre uniquement le composant défectueux et
de laisser le reste du système d'alimentation en service afin de
minimiser les interruptions d'alimentation et d'assurer la stabilité .
La
sélectivité ,
ou la discrimination , entre les dispositifs de protection peut
être définie comme « la coordination des dispositifs de
protection, pour qu'un défaut survenant en un point quelconque du réseau soit
éliminé par le dispositif de protection amont, le dispositif de protection
immédiatement en amont de le défaut et par ce seul dispositif de
protection " .
Voyons
un exemple de cette définition en regardant le schéma unifilaire de
la figure 6, où il y a des systèmes de protection SP1 à SP6 :
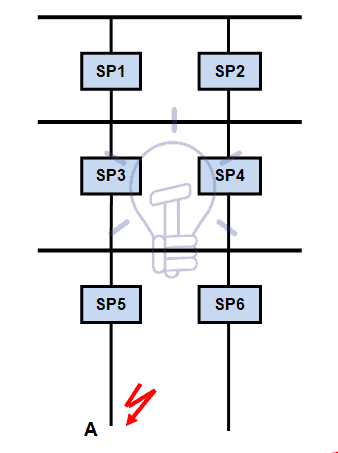
Figure 6 - Schéma unifilaire de l'installation
électrique
La
sélectivité signifie
que si une erreur se produit au point A , le seul système
de protection à activer est SP5 et les autres
systèmes de protection ne doivent pas être activés.
Deux
principes sont utilisés pour établir la sélectivité:
·
Discrimination actuelle .
·
Discrimination temps .
Coordination du
nivellement et de la protection dans les réseaux BT, MT et HT
Pour
établir des études de coordination de classement et de protection, il
faut tenir compte de la configuration et de la complexité du réseau .
Les
réseaux de distribution BT et d'utilisateurs ont généralement une configuration
radiale .
Les
réseaux de distribution MT ont généralement une combinaison d' alimentation
radiale et à double extrémité avec des configurations sans point et
une complexité importante .
Les
utilisateurs Les réseaux MT ont généralement une configuration radiale ,
bien que dans les usines principales, une alimentation à deux
extrémités avec une configuration de point NO soit utilisée.
En
raison de la complexité des études de coordination et de
coordination des réseauxpour les réseaux de transmission HT et
de distribution MT , des ingénieurs spécialisés sont
nécessaires et l'utilisation de logiciels spécifiques pour l'analyse de
réseau comme ETAP, PSS / E, EPSO et PTW .
Les
études de coordination
du classement et de la protection du réseau des utilisateurs
MV sont généralement plus faciles et peuvent suivre les instructions
de base qui seront discutées plus loin dans cette section.
Une
attention particulière doit être observée dans les limites du réseau de
l'entreprise de distribution électrique ( alimentation )
et le protocole de coordination réseau et protection
des utilisateurs doit être établi entre les deux entités .
Pour
les réseaux BT utilisant des disjoncteurs et / ou des
fusibles, la sélectivité " disjoncteur /
disjoncteur ", " fusible / fusible "
et " disjoncteur / fusible " peut être obtenue en
comparant les " courbes temps-courant " pour une
certaine valeur de le courant de défaut , en utilisant
les principes de « c la discrimination dusyst » et
« discrimination du temps », fait référence ci
- dessus.
La
discrimination de courant est utilisée pour la protection contre
les surchargeset la protection est sélective si le rapport
entre les seuils de réglage est supérieur à 1,6 .
La
discrimination temporelle est utilisée pour la protection contre
les courts-circuits , en utilisant un disjoncteur ou un
fusible en amont avec une temporisation et
ainsi le déclenchement du dispositif en aval est plus rapide ; la
protection est sélectivesi le rapport entre les seuils de
protection contre les courts-circuits n'est pas inférieurà 1,5 .
Protection des lignes
aériennes
Défauts courants dans
les lignes aériennes
Les
causes les plus fréquentes de défauts dans les lignes aériennes sont:
·
Aéronefs
et voitures heurtant des lignes et des structures
·
Oiseaux
et animaux
·
Isolants
contaminés
·
Chargement
de la glace et de la neige
·
Foudre
·
Décharges
partielles (corona) non contrôlées
·
Isolateurs
perforés ou cassés
·
Des
arbres
·
Vent
Dispositifs de
protection des lignes aériennes
Les
lignes aériennes BT sont
protégées contre les surintensités à l' aide de fusibles
ou de disjoncteurs .
La
protection des lignes aériennes MT est généralement assurée
par des relais de surintensité ( 50; 50N; 51; 51N; 67;
67N ) connectés à CT .
Une
protection contre les surintensités échelonnées dans le temps ne peut pas être
appliquée avec succès aux lignes de transport aériennes HT car
il existe généralement de nombreuses sources interconnectées de
courants de défaut qui peuvent être limitées par un limiteur de courant de défaut .
Les
exigences des schémas de protection pour les lignes aériennes HT sont:
·
Le
système de protection doit être capable de détecter tous les défauts sur la
ligne protégée.
·
Le
système de protection doit être en mesure de faire la distinction entre les
défauts sur la ligne protégée et les défauts sur les lignes adjacentes, les
bus, les transformateurs, etc.
·
Le
système de protection doit être capable d'éliminer les défauts très rapidement
(c'est-à-dire en moins d' une seconde ) avant que le système d'alimentation nedevienne
instable.
·
Le
système de protection doit être fiable et doit pouvoir éliminer les défauts en
cas de panne d'un seul équipement.
Pour
répondre à ces exigences, les dispositifs de protection courants utilisés
dans les lignes aériennes HT sont:
·
Protection
différentielle et comparaison de phase
·
Protection
de distance
La
protection différentielle est principalement utilisée sur les lignes
aériennes courtes et la protection de distance sur les
lignes aériennes longues .
La
distinction entre les lignes aériennes courtes et longues est
basée sur une comparaison entre l' inductance et la résistance et la
capacité de la ligne aérienne.
Lorsque
la résistance et la capacité sont négligeables par rapport à
l'inductance , la ligne de tête est considérée comme courte .
Cette
comparaison est généralement effectuée en utilisant le diagramme π de
la ligne aérienne .
Le
niveau de tension, la construction physique de la ligne de transmission, le
type et la taille des conducteurs et l'espacement des conducteurs déterminent
l'impédance de la ligne et la réponse physique aux conditions de court-circuit,
ainsi que le courant de charge.
En
outre, le nombre de terminaux de ligne détermine le débit de charge et de
courant de défaut, qui doit être pris en compte par le système de protection.
Les
lignes parallèles ont également un impact sur le relais, car le couplage mutuel
influe sur le courant de terre mesuré par les relais de protection.
La
présence de transformateurs à prises sur une ligne, ou de dispositifs de
compensation réactifs tels que des batteries de condensateurs en série ou des
réactances shunt, influence également le choix du système de protection et les
réglages du dispositif de protection.
Pour
cette raison, une étude détaillée de la ligne aérienne est nécessaire pour
choisir les relais de protection les plus appropriés à utiliser.
Cependant,
il est habituel de considérer une ligne courte comme ayant une
longueur allant jusqu'à 80-100 km , en fonction du niveau de
tension et des caractéristiques du réseau.
Environ 90% des défauts
de ligne aérienne sont transitoires et les défauts
peuvent être:
·
Phase-à-terre
·
Phase-à-phase
·
Phase-à-phase-à-la-terre
·
Trois
phases
Avec de
tels défauts, un seul pôle-déclenchement peut être nécessaire
et la ligne peut être remise en service immédiatement après que les
disjoncteurs se soient déclenchés .
Par
conséquent, les schémas de déclenchement unipolaire et de
réenclenchement automatique sont normalement utilisés dans les
disjoncteurs associés aux lignes aériennes de transmission (généralement V
≥ 220 kV ).
Si
le courant de défaut est interrompu par les disjoncteurs,
l' arc de contournementest immédiatement éteint et l'air
ionisé se dissipe .
La
réenclenchement automatique sera normalement réussi après un délai de seulement
quelques cycles .
Lors de
l'exécution de travaux sous tension, les dispositifs de réenclenchement
automatique sur les lignes en cours de traitement doivent être réglés sur
non-refermeture .
Les
disjoncteurs doivent être conçus spécifiquement pour ces performances et être
exemptés de l'inconstance des poteaux jusqu'à ce qu'un ordre de déclenchement
définitif soit donné .
Protection
différentielle et de comparaison de phase
Le principe
fondamental de la protection différentielle ( loi
des courants de Kirchhoff ) est appliqué à la ligne de
transmission en comparant le courant entrant dans la ligne à
un terminal, avec la ligne de départ actuelle à l'autre borne .
Les relais
différentiels de ligne à chaque extrémité de la ligne de transmission de comparer
les données sur le courant de ligne par
l' intermédiaire d' une liaison de communication à fibres optiques ,
habituellement par OPGW ( puissance optique câble de terre cable), utilisé
pour la conception d'éclairage protection de la
ligne aérienne , wich a à l'intérieur câbles à fibres optiques .
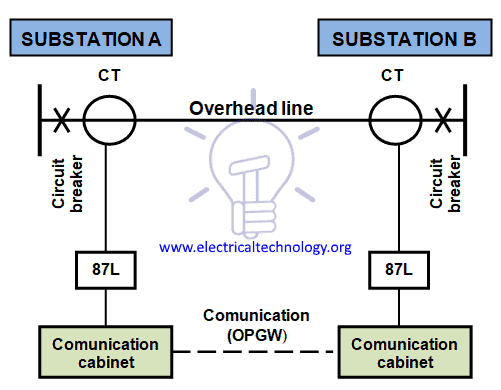
Figure 7 - Diagramme de protection différentielle des
lignes aériennes
Un
autre système de relais de protection pour les lignes de transmission
HT , basé sur le principe de protection différentielle qui
est utilisé de nos jours même pour leslignes longues ,
est la protection par comparaison de phase .
Ce
système utilise le principe de la comparaison de l'angle de phase entre
les courants aux deux extrémités de la ligne protégée . Pendant les
défauts externes, le courant entrant dans la ligne a le même
angle de phase relatif que le courant quittant la ligne , et les relais
de comparaison de phase à chaque borne mesurent peu ou pas de
différence d'angle de phase .
La
protection se stabilise donc et aucun déclenchement ne se produit . Pour
un défaut interne, le courant pénètre dans la ligne
aux deux extrémités et les relais de comparaison de phase détectent
cette différence d'angle de phase . Le relais
fonctionne alors pour effacer le défaut .
Avec
les schémas de comparaison de phase, les relais de démarrage sont utilisés pour
démarrer le processus de comparaison de phase chaque fois qu'une
condition de défaut est détectée . Ces relais de
démarrage doivent fonctionner pour les défauts internes et
externes .
Un canal
de communication fiable est requis pour la protection de comparaison
de phase et la fibre optique dans les câbles OPGW a
été utilisée.
La
figure 8 montre le le schéma unifilaire de Merz
Prix système d'équilibrage de tension pour la protection
de la ligne triphasée
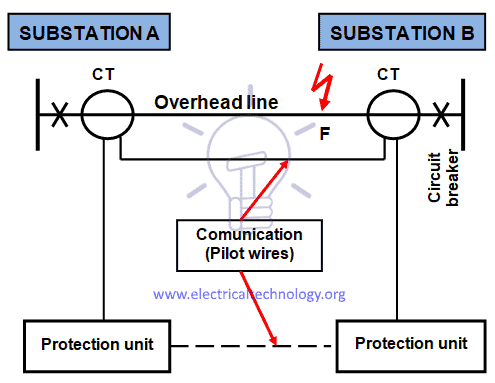
Figure 8 - Diagramme de protection de comparaison de
phase
Des CT identiques sont
placés dans chaque phase aux deux extrémités de la
ligne . La paire de TC à chaque extrémité est
connectée en série avec un relais de manière que, dans
des conditions normales , leurs tensions secondaires soient
égales et en opposition , c'est-à-dire qu'elles s'équilibrent .
Dans
des conditions saines, le courant entrant dans la ligne à une extrémité
est égal à celui qui la laisse à l'autre extrémité .
Par
conséquent , des tensions égales et opposées sont induites dans
les secondaires du CT aux deux extrémités de la ligne . Le résultat est qu'aucun
courant ne traverse les relais .
Quand
une défaillance se produit au niveau du point F sur la
ligne comme le montre la figure 8 , il entraîne une plus
grande courant d' écoulement à travers CT 1 à
CT par deux .
En
conséquence, leurs tensions secondaires deviennent inégales et le courant
circulant traverse les fils pilotes et les relais. Les disjoncteurs aux
deux extrémités de la ligne se déclencheront et la ligne défectueuse sera
isolée.
Protection de distance
Un relais
de distance mesure l' impédance d'une ligne en utilisant
la tension et le courant appliqués au relais .
Quand
une panne survient sur une ligne , le courant augmente
considérablement et la tension s'effondre de manière
significative .
Comme
l' impédance d'une ligne de transmission est proportionnelle
à sa longueur , pour la mesure de distance, il
convient d'utiliser un relais capable de mesurer
l'impédance d'une ligne jusqu'à un point prédéterminé (le point
d'atteinte ).
Le relais
de distance (également appelé relais d'impédance )
détermine l' impédancepar l'équation Z = U / I ( loi
Ohm ).
Un tel
relais est conçu pour fonctionner uniquement pour les défauts se
produisant entre l'emplacement du relais et le point d'accès sélectionné ,
ce qui donne une discrimination pour les défauts qui
peuvent survenir dans différentes sections de ligne.
L' impédance
apparente ainsi calculée est comparée à
l' impédance du point d'atteinte .
Si
l' impédance mesurée est inférieure à l'impédance du
point d'atteinte , il est supposé qu'il existe un défaut
sur la ligne entre le relais et le point d'atteinte.
Si
l' impédance est dans le réglage de portée du relais , il
fonctionnera.
Des
protections de distance sont installées aux deux extrémités de
la ligne et une communication est établie entre
elles , comme le montre la figure 9.
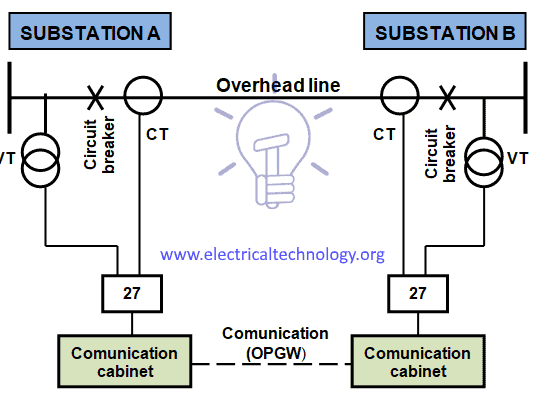
Figure 9 - Diagramme de protection de distance de
ligne aérienne
Les performances
du relais de distance sont définies en termes de précision de portée
et de durée de fonctionnement .
La
précision de la portée est une comparaison de la portée ohmique
réelle du relaisdans des conditions pratiques avec valeur de
réglage relais en ohms et dépend enparticulier du niveau
de tension présenté au relais en cas de défaut .
Les
techniques de mesure d'impédance utilisées dans des conceptions de relais
particulières ont également un impact.
Les
temps de fonctionnement peuvent varier en fonction du courant de
défaut, de la position de défaut par rapport au réglage du relais et du point
de l'onde de tension à laquelle le défaut se produit .
En
fonction des techniques de mesure employées dans un modèle de
relais particulier, mesure des erreurs transitoires du signal, telles que
celles produites par le condensateur VT ( CVT )
ou CT saturant , peuvent également retarder le fonctionnement
du relais pour les défauts proches du point d'atteinte .
Les
caractéristiques des relais de distance - forme
de protection - sont définies comme une fonction graphique de
la résistance ( R ) et de l' impédance ( X ) de
la ligne - diagramme R / X ou admittance .
Les
formes typiques sont circulaires ( caractéristique
mho ) et quadrilatérales , qui sont représentées sur
les figures 10 et 11.
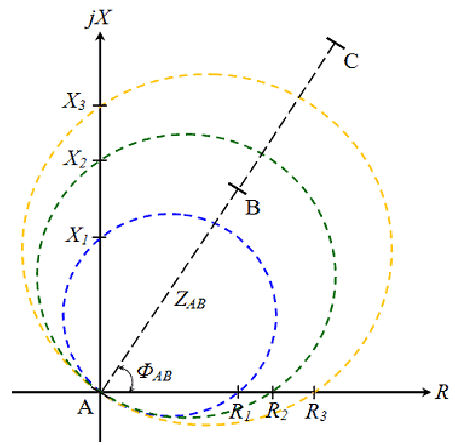
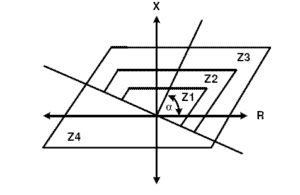
Figure 11 - Caractéristique quadrilatérale
L' élément
d' impédance mho est généralement connu en tant que tel parce
que sa caractéristique est une ligne droite sur un diagramme
d'admittance .
Les caractéristiques
d' impédance polygonale sont très flexibles en
termes de couverture d'impédance de défaut pour les
défauts de phase et de terre et pour cette raison, de nos jours la
plupart des relais de distance offrent cette forme de
caractéristique .
Relais
de distance peuvent
avoir jusqu'à cinq zones , certains ensemble pour
mesurer dans la r direction de Réverse (utilisé comme barre
omnibus protection de sauvegarde ). A chaque
zone correspond un temps d'activation du relais .
Les
relais de distance sont
utilisés des deux côtés de la ligne et chacun d'entre eux voit le
défaut sur différentes périodes de temps , en fonction de la distance
du point défectueux ( F ) à chaque extrémité
de la ligne .
Considérant
une ligne aérienne reliant les sous-stations A et B , F sera vu
premièrement par le relais de distance installé dans
la sous - station plus près de F et
le disjoncteur respectif se déclenchera d'abord que
le disjoncteur placé au niveau duautre sous-station .
Pour
éviter que le défaut de court-circuit continue à être alimenté
par l' autre côté de la ligne jusqu'à ce que la protection
de distance respective actionne une liaison de communication
entre les relais de protection , habituellement par fibre optique
dans OPGW câbles .
Il
n'est pas pratique de régler un relais d'impédance pour
mesurer exactement l' impédance de la ligne jusqu'au
disjoncteur à l'extrémité distante . Cela est dû à des erreurs
et des inexactitudes dans des choses telles que CT, VT,
relais, calcul de l'impédance de ligne, etc .
Pour
cette raison, nous réglons le relais pour mesurer ou atteindre une impédance
inférieure à la longueur totale de la ligne (la zone de réglage 1
jusqu'à 85% peut être sûre et la marge de sécurité
de 15-20% garantit qu'il n'y a aucun risque de la protection
de la zone 1 dépassant la ligne protégée
en raison de ces erreurs et inexactitudes, sinon il y aurait une perte
de discrimination avec une protection d'exploitation
correcte sur la section de ligne suivante ).
Une
sélection minutieuse des réglages de portée et des temps de
déclenchement pour les différentes zones de mesure permet une coordination
correcte entre les relais de distance sur un système d'alimentation.
Réenclenchement
Comme
analysé à la section 4.2, la plupart des défauts sur les lignes
aériennes sont asymétriques et transitoires.
Le réenclenchement
automatique est effectué par l'intermédiaire d'un relais ( relais à
réenclenchement automatique ) initié par les dispositifs de protection de
la ligne aérienne , comme celui illustré à la figure 12.

Figure 12 - Relais de réenclenchement automatique
Il
existe différentes raisons pour refermer une ligne . Il
est impératif de recueillir les commentaires et les conseils des
groupes de planification et des groupes opérationnels pour déterminer
les pratiques de réenclenchement appropriées pour un
service et une région donnés . Voici quelques-unes des
principales considérations pour le réenclenchement du niveau de transmission:
·
Stabilité
du système
·
Sécurité
du système
·
Continuité
de service.
Les
paramètres les plus importants d'un schéma de réenclenchement automatique sont:
·
Temps
mort
·
Récupérer
le temps
·
Un ou
plusieurs voyages
Ces
paramètres sont influencés par:
·
Type de
protection
·
Type
d'appareillage
·
Problèmes
de stabilité possibles
·
Effets
sur les différents types de consommateurs
Refermeture peut être
soit haut débit sans surveillance ou temps différé ,
encadré par des éléments de tension / synchronisation . La
décision quant à laquelle appliquer doit peser le bénéfice et les
conséquences de chacun pour déterminer l'acceptabilité du risque dans la
demande particulière .
Le
réenclenchement sur les lignes non critiques , tel que déterminé précédemment par
les groupes de planification, peut varier, et en fonction de la
philosophie de protection et de l'équipement appliqué .
Les
pratiques varient entre les services publics; Les pratiques de
réenclenchement varient également en fonction des niveaux de tension et du type
de ligne considérée .
Certaines
entreprises se referment automatiquement pour tous les
défauts et bloquent uniquement la perte de communications . Certains
utilitaires se refermentsi la vitesse d'effacement est
suffisamment rapide , indépendamment de la configuration du
défaut .
La
stabilité du système est un facteur déterminant sur la tentative de
réenclenchement automatique à grande vitesse.
Les
problèmes impliqués dépendent de la faiblesse ou de la force du système de
transmission .
Avec
un système faible , la perte d'un lien de transmission peut conduire
rapidementà un angle de phase excessif à travers le disjoncteur utilisé
pour la refermeture , empêchant ainsi une refermeture
réussie .
Dans
un système relativement fort , le taux de changement
de l'angle de phase sera lent , de sorte que l' auto-réenclenchement
différé peut être appliqué avec succès .
Cela
inclut les problèmes de refermeture trop lente et les inquiétudes que le
système entre en instabilité s'il est refermé sur une ligne défectueuse .
Dans
les situations où le refermeture sur une ligne défectueuse n'affecte
pas la stabilité du système , des tentatives de
réenclenchement multi-trajets peuvent être possibles. Dans ce
cas, la restauration de la ligne est nécessaire plus pour la continuité
de la charge aux clients .
En
Europe, il est habituel d'utiliser des systèmes d'auto-réenclenchement uniquement
dans les réseaux HT , bien que dans certains pays, comme les
États-Unis et le Brésil, ces systèmes soient également utilisés dans les réseaux
MT .
Le type
le plus courant de panne du système d'alimentation est l'amorçage des
isolateurs sur les lignes de transport aériennes, en raison de la foudre.
Le
nombre de défauts par an est proportionnel à la longueur et est
approximativement inversement proportionnel au niveau de tension.
Les
chiffres indicatifs des fautes sont:
·
≥ Lignes aériennes de 500 kV - 9 défaillances par année par 100
km .
·
Lignes aériennes 150-400 kV - 5 failles par an
et par 100 km .
·
Lignes aériennes de 60-138 kV - 7 pannes par an
et par 100 km .
Pour
les lignes aériennes jusqu'à 49,5 kV, les chiffres sont
proportionnellement plus élevés.
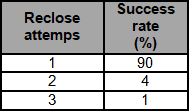
Le
tableau 1 montre les statistiques de succès de l'élimination des fautes
d'auto-réenclenchement:
Protection des câbles
d'alimentation
Types communs de
défauts et de causes
Les modes
de défaillance courants et les défauts des câbles sont:
Pannes
électriquement induites
Ceux-ci
impliquent la foudre, les surtensions et les décharges partielles .
Les
décharges partielles peuvent
être causées par une mauvaise conception du système d'isolation ou par des
défauts de fabrication.
Défaillances
induites mécaniquement
Une défaillance
induite mécaniquement peut se produire pendant l'installation en
raison de l' utilisation d'une tension de traction excessive et / ou
d'un dépassement des rayons de courbure minimaux .
Le câble
peut également être endommagé pendant la construction lorsque les engins de
terrassement peuvent creuser dans le câble ou les rangées de câbles, comme
dans les câbles sous-marins .
Des
flexions et des torsions répétées pendant l'installation ou la mise en
service peuvent entraîner une déformation irréversible des fils
conducteurs .
Défaillances
induites thermiquement
La
dégradation thermique fait perdre à l' isolation
du câble ses propriétés physiqueset est due à une surcharge
au-delà de sa capacité nominale pour des périodes prolongées et / ou des
conditions de température ambiante excessive .
Dégâts
de blindage métalliques (semi-conducteurs)
Ce mode
de défaillance décrit où le bouclier cesse d'exécuter sa
fonction .
Pour
que le bouclier puisse remplir sa fonction, sa résistivité volumique
doit toujours rester suffisamment faible . Cependant,
lorsque le blindage métallique est endommagé ou corrodé, sa résistivité
volumique est affectée par la température .
A
des températures plus élevées , la résistivité
volumique de l'augmentation de blindage métallique de manière
significative ( en raison des charges de pointe,
les courants de déséquilibre ou des courants de circulation )
donnant lieu à des gradients de haute tension au niveau
des bords métalliques tranchants qui conduira à effet corona / décharge et
les dégâts d' arc ( de l' extérieur dans ).
La
couronne et les arcs conduiront à une éventuelle défaillance de l' isolation des câbles .
Mauvais
Contact de Bouclier Métallique
C'est
le cas lorsque le blindage métallique est isolé du blindage
semi-conducteur en raison d'un mauvais contact , de
ce qui peut être causé par une couche de corrosion ou une
accumulation de tartre sur le blindage métallique .
Une
telle condition entraînera une différence de potentiel entre le
blindage semi-conducteur et le blindage métallique qui provoquera
un arc entre les deux blindages. .
Cela
entraînera des dommages d'arc de l'extérieur dans le
bouclier semi-conducteur et l'isolation et une éventuelle
défaillance du câble , ce qui est plus grave s'il y
a plusieurs zones de mauvais contact ou de coupures entre les deux
systèmes de blindage .
Les
défaillances dans
la plupart des cas se produisent aux extrémités ou aux joints(où
l' isolation fabriquée en usine est perturbée ).
Les
causes les plus spécifiques des défaillances du câble d'alimentation sont les
suivantes:
·
Court-circuit
entre phase et terre
·
Court-circuit
entre phases
·
Résistance
d'isolation réduite
·
Résistance
diélectrique réduite
·
Décharge
partielle excessive
Certaines
des principales causes de défaillance des câbles sont:
·
Vieillissement
·
Corrosion
de la gaine
·
Ponction
électrique
·
Les
surtensions dues au feu et à la foudre
·
Chauffage
des câbles
·
Les
échecs mécaniques
·
Humidité
dans l'isolation
·
Mauvaise
sélection ou application
Protection
différentielle
Le
moyen idéal de protéger n'importe quel équipement d'un système d'alimentation
est de comparer le courant entrant dans cet équipement avec le courant
qui le quitte.
Dans
des conditions de santé normales, les deux sont égaux . Si
les deux courants ne sont pas égaux, une erreur doit exister.
Ceci
est fait par la protection différentielle (87) qui
a été discutée à la section 4 ( protection des lignes aériennes )
et qui sera également discutée à la section 6 ( Protection du
transformateur ).
Il
n'est pas économique ou pratique de prévoir un canal de communication entre les
extrémités d'un dispositif d'alimentation pour permettre la comparaison des
courants entrant et sortant du dispositif d'alimentation.
Pour
cette raison, ce type de protection n'est pas couramment utilisé sur
les dévidoirs de câbles BT et BT et est utilisé par
certaines sociétés de transport d'électricitédans les câbles HT ,
principalement pour des tensions supérieures à 123 kV .
Dans ce
cas, la protection différentielle est utilisée comme protection
principale et la protection contre les surintensités est
utilisée comme protection de secours .
Protection contre les
surintensités pour câbles
Pour
définir le type de protection contre les surintensités pour
les câbles d'alimentation est nécessaire de regarder d'abord
la configuration du réseau .
Les
réseaux de distribution MT peuvent avoir plusieurs types de configurations:
·
Radial
·
Type
annelé
·
Alimentation
double-extrémité sans point
Une
combinaison des types mentionnés ci-dessus est utilisée, et les configurations
les plus courantes sont l' alimentation radiale et
à double extrémité avec un point NO .
Les
réseaux de distribution BT sont généralement radiaux.
Les
réseaux internes et privés d'installations et de bâtiments MT et BT sont généralement
radiaux , mais dans les grandes installations, une alimentation
à deux extrémités avec un point NO peut être observée dans les réseaux
MT .
Les
départs-câbles BT peuvent
être protégés contre les surintensités par des fusibles(une
solution courante pour les réseaux de distribution en Europe et en Amérique du
Nord) ou par des dispositifs magnétiques thermiques dans
les disjoncteurs .
Les
câbles d'alimentation MT , à savoir dans les réseaux de
distribution publique en Europe et en Amérique du Nord, peuvent être
protégés par des fusibles contre les surintensités .
Avec
les alimentations radiales et les alimentations
à deux extrémités avec point NO, il n'y a qu'un seul point
d'alimentation possible et le courant de défaut est dans une
seule direction . La protection contre les surintensités peut
donc être utilisée pour assurer une protection adéquate .
Les
relais communs utilisés pour cette protection sont la surintensité de
phase instantanée ( 50 ) , la
surintensité de terre instantanée ( 50N ) ,
la surintensité de phase temporisée ( 51 ) et
la surintensité de temporisation ( 51N ).
Le
courant entrant dans le départ au disjoncteur est mesuré au moyen d'un TC ,
comme indiqué sur la Figure 13.
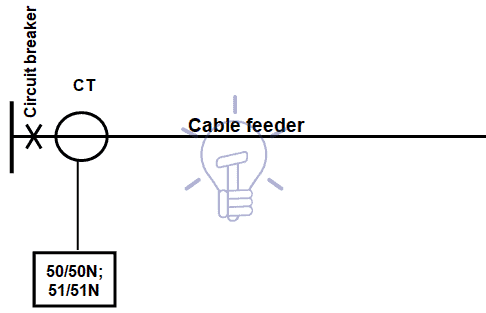
Figure 13 - Schéma de câblage de la protection contre
les surintensités
Considérons
la situation d'un dispositif d' alimentation de câble entre les stations A et B,
B étant situé en aval de A .
La protection
contre les surtensions à l'extrémité d'alimentation du chargeur à
la station A doit fonctionner pour tous
les défauts sur le chargeur , mais ne doit pas
fonctionner pour des défauts au - delà de la station B .
Si nous
considérons d'abord un relais de surintensité instantané ,
alors le réglageest déterminé par l' amplitude du courant
de défaut à la fin de l'alimentation de la station B qui
est le courant de défaut inférieur. sur le câble.
Idéalement
, le relais sera réglé pour que
le courant de défaut et il ne doit pas fonctionner pour une
faute au - delà de la station B .
Cependant,
dans la pratique, il n'est pas possible d'être aussi précis pour
les raisons suivantes:
·
Il
n'est pas possible pour le relais de différencier les défauts très proches,
mais qui sont de chaque côté du Bus 'B', car la différence de courant serait
extrêmement faible.
·
Des
imprécisions dans les TC et les relais, et les effets de
la distorsion de la forme d'onde de courant dans des
conditions transitoires produisent des erreurs dans la réponse du schéma
de protection .
·
L' amplitude
du courant de défaut ne peut pas être établie avec précision puisque
tous les paramètres peuvent ne pas être connus , et l' impédance
de source du système d'alimentation change à mesure que
les générateurs sont mis en et hors service .
Une
solution pour résoudre ce problème consiste à régler le relais de
surintensité instantané pour dépasser le terminal
distant et introduire un délai défini pour déclencher
le disjoncteur. .
Ce délai permettra
aux relais à maximum de courant à la station à distance de
fonctionner pour éliminer les défauts au - delà de bus
B avant le temps retardé le déclenchement peut avoir lieu à
la station d'alimentation A .
Ce type
de retard a l' inconvénient majeur que toutes
les fautes seront éliminées lentement, même les failles très
proches , qui ont le plus grand courant de défaut .
Cet effacement
temporisé des courants de défaut élevés est généralement inacceptable ,
et le schéma de protection de départ le plus courant ,
qui surmonte le problème , utilise un relais de
surintensité à temps inverse ( 51) conjointement avec
le relais de surintensité instantané ( 50 ).
Afin
d'assurer que le relais de surintensité instantanée ne pas
fonctionner inutilement les défauts à la station à distance ,
( qui devrait être effacé par la protection de surintensité ou fusibles
à cette station ), il doit être réglé pour protéger seulement
une partie du dispositif d' alimentation . Un
maximum de sécurité pour la plupart des types de relais est de 80% de la
longueur du chargeur .
La limite est
déterminée par les caractéristiques du relais utilisé et
la longueur du chargeur . Si le chargeur est
long, un pourcentage élevé de la ligne peut être protégé ; mais
avec des lignes courtes, il peut être moins ; et
avec des lignes très courtes, il peut ne pas être
possible d'appliquer une protection instantanée contre les
surintensités .
Ce type
de protection est connu sous le nom de protection contre les
surintensités instantanées à seuil élevé ( HS ) .
Avec un
tel relais réglé pour détecter des défauts sur 80% du
chargeur, les 20% restants sont laissés sans
protection . Ceci n'est bien sûr pas acceptable . Fournir
une protection pour les derniers 20% de la ligne
d'alimentation, avec un temps minimum défini , ou un
temps minimum défini inverse on peut utiliser un relais .
Le relais
à temps minimum défini "inverse" a
une courbe " temps-courant "caractéristique comme
le montre la figure 14.
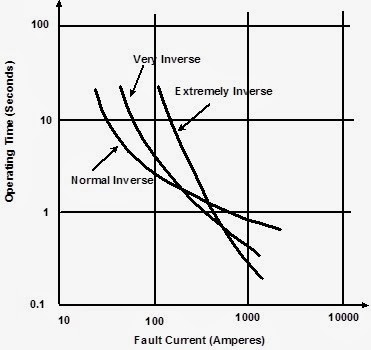
Figure 14 - Courbe caractéristique
"temps-courant" du relais à temps minimum défini inverse
En
utilisant cette caractéristique " courbe temporelle ",
il faut définir la coordination des protections en amont et en aval ,
un sujet qui a été discuté à la section 3.3.
Maintenant,
regardons un chargeur d'alimentation typique qui fournit des
transformateurs clients à de nombreux points différents le
long de sa longueur .
Les
mêmes relais de surintensité instantanés à seuil élevé et de surintensité
temporisée inversée sont utilisés, et le relais HS doit
être réglé de manière à ne pas fonctionner pour les défauts au-delà du
premier branchement .
Le relais HS sera donc réglé
pour fonctionner avec des défauts jusqu'à 80% de
la distance jusqu'au premier robinet .
Les
critères utilisés pour le réglage du relais à maximum de courant
inverse sont:
1. Le relais ne doit pas
fonctionner pour le courant de charge maximal qui sera transporté par le
chargeur.
2. Le réglage du relais
doit être suffisamment sensible pour que le relais fonctionne et éliminer les
défauts à la toute fin du chargeur.
3. La caractéristique de
fonctionnement du relais doit être réglée pour être coordonnée avec d'autres
dispositifs de protection, tels que des fusibles, «en aval» de la station
d'alimentation.
Ce type
de système de protection fournira une protection adéquate pour les mangeoires .
Cependant, cet
arrangement présente certains inconvénients , en
particulier pour les départs longs . Le principal
inconvénient est que la plupart des défauts sont lents à
effacer car le relais de surintensité à temps inverse doit
fonctionner. Cette libération lente des dérangements perturbe généralement les
clients sur le chargeur affecté .
Les
critères utilisés pour le réglage du relais de surintensité instantané
à seuil élevésont:
1. Le relais doit être
réglé pour fonctionner en cas de panne jusqu'à la première prise du chargeur,
mais pas au-delà.
2. En pratique, le relais
est réglé pour fonctionner avec des défauts jusqu'à 80% de la
distance jusqu'au premier branchement.
3. Ceci fournit un
dégagement rapide pour les défauts de haut niveau proches de l'alimentation
Dans
les réseaux avec une configuration de type annelé courant
de défaut peut circuler dans les deux sens , et
la protection contre les surintensités d'alimentation à
la station d'alimentation peut nécessiter une surveillance
directionnelle sur les départsque dans une situation
normale ont une seule direction actuelle .
Un relais
directionnel - maximum de courant phase directionnelle ( 67 )
et à maximum de courant à la terre directionnel ( 67N )
- doit être utilisé lorsque le courant de court-circuit
entre phase et terre ( I » K 1 )
est plus faible que le courant capacitif résiduel maximal [4] ( I CM ). dans
la même situation - I CM ≥ I " K1 .
Le
courant de court-circuit phase-terre dépend du système de mise à la terre
neutre du réseau.
La
protection directionnelle à maximum de courant comprend
un relais de surintensité et un relais directionnel de
puissance .
Le relais
directionnel de puissance n'est pas utilisé pour mesurer la
puissance , mais est agencé pour répondre à la direction du flux
de puissance .
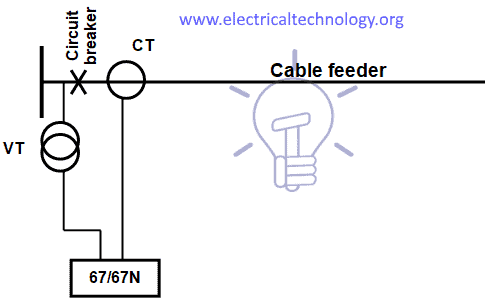
Figure 16 - Schéma de câblage de la protection contre
les surintensités directionnelles
Protection du
transformateur
Défaillances du
transformateur
Des défauts
de transformateur peuvent survenir
dans le diélectrique ( huile, gaz [5]ou
résines / vernis ), en raison du vieillissement, de la
contamination par l'air, de la formation de gaz et du manque de pression et de
niveau .
Les
enroulements peuvent
également être soumis à des défauts , tels que la surchauffe
et la panne d'isolation .
La
surchauffe peut
être provoquée par des surcharges supérieures aux surcharges
admissibles spécifiées par les fabricants ,
conformément aux normes CEI ( 60354 pour les
transformateurs remplis d'huile et 60905 pour les transformateurs secs )
et aux défauts externes , tels que les courts-circuits sur
les installations aval . La plupart de ces défauts peuvent être
limités par l' entretien correct d'un transformateur .
Une
surchauffe peut provoquer une panne de l'isolation des enroulements.
Protections intégrées
du transformateur
Les
transformateurs sont
fournis avec des protections internes ( intégrées ) pour la
pression d'huile, le niveau et la température, la défaillance diélectrique
(formation de gaz), la température d'enroulement et le changeur de prises en
charge .
Selon
le type de construction des transformateurs, les protections suivantes doivent
être fournies:
Transformateurs
remplis d'huile avec conservateur
·
Relais
Buccholz pour défaillance diélectrique ( 2 étapes : alarme
et déclenchement )
·
Pression
d'huile et interrupteurs de niveau ( 2 étapes : alarme
et déclenchement )
·
Thermostat
pour la température de l'huile ( 2 étapes : alarme et
déclenchement )
·
Protection
du changeur de prises en charge ( 2 étapes : alarme et
déclenchement )
Le
relais Buccholz a plusieurs
méthodes pour détecter un transformateur défaillant .
·
Lors
d'une accumulation lente de gaz , due peut-être à une légère
surcharge , le gaz produit par la décomposition de l'huile
isolante s'accumule dans la partie supérieure du relais et
fait baisser le niveau d'huile . Un interrupteur à flotteurdans
le relais est utilisé pour déclencher un signal
d'alarme . Selon la conception, un deuxième flotteur peut
également servir à détecter les fuites d'huile lentes .
·
Si
un arc se forme , l'accumulation de gaz est rapide et
l' huile s'écoule rapidement dans le conservateur . Ce flux
d'huile actionne un interrupteur fixé à une palette située
sur le trajet de l'huile en mouvement .
Relais
Buchholz ont
un port d'essai pour permettre au gaz accumulé à retirer
pour les tests . Le gaz inflammable trouvé dans
le relais indique un défaut interne tel
qu'une surchauffe ou un arc électrique , alors que l' air trouvé
dans le relais peut indiquer seulement un niveau
d'huile bas ou une fuite .
Transformateurs
scellés remplis d'huile
·
Détection
de gaz et niveau d'huile, pression et température en un seul équipement ( DGPT2 - Détection
de Gaz, Pression et Température ) avec 2 niveaux ( alarme
et déclenchement )
Transformateurs
secs
·
Température
des enroulements à 2 niveaux ( alarme et déclenchement )
- détecteur de température à résistance PT 100 ( platine )
ou PTC ( coefficient de température positif ),
c'est-à-dire un thermisteur ( matériau semi-conducteur
sensible à la température ).
Ces
protections ont une action directe sur les bobines de déclenchement des
disjoncteurs.
Protection
différentielle
Les
transformateurs et autotransformateurs pour les tensions supérieures
à 49,5 kV et les transformateurs MT de puissance
nominale supérieure à 3-4 MVA ont généralement
comme protection principale une protection différentielle ( 87T ),
pour les défauts d'enroulement - court-circuit entre
spires d'un enroulement ou enroulements correspondant à phase
court-circuit de type triphasé ou triphasé .
S'il
n'y a pas de connexion de mise à la terre / mise à la terre au point d'emplacement du
transformateur , cette protection peut également être
utilisée pour protéger contre les défauts à la terre .
Si
le courant de défaut à la terre est limité
par l' impédance , il n'est généralement pas possible de régler
le seuil de courant à une valeur inférieure au courant limite .
La
protection différentielle est connectée aux transformateurs de courant CT (Transformateur de courant )
des deux côtés du transformateur ( primaire et secondaire).
·
Problème relatif au
rapport de transformation et à la méthode de couplage
Les courants primaire
et secondaire ont des amplitudes différentes du fait
du rapport de transformation et des différentes phases selon
la méthode de couplage (le transformateur delta-étoile
effectue un déphasage de 30 ° ). Par conséquent,
les valeurs de courant mesurées doivent être réajustées
de sorte que les signaux comparés soient égaux pendant
le fonctionnement normal .
Ceci est
fait en utilisant des transformateurs auxiliaires correspondants dont le rôle
est d' équilibrer les amplitudes et les phases .
Lorsqu'un côté
du transformateur est connecté en étoile avec un neutre mis à la terre ,
les transformateurs correspondants de ce côté sont connectés
en triangle , de sorte que les courants résiduels qui seraient
détectés lors de l'apparition d'un défaut à la terre en dehors du
transformateur sont effacés.
La
figure 16 montre un exemple de connexion de la protection
différentielle , utilisant des transformateurs auxiliaires
correspondants .
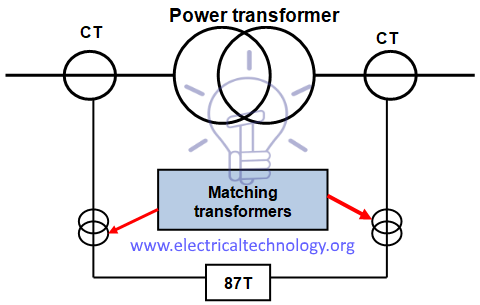
Figure 16 - Diagramme de protection différentielle du
transformateur
De nos
jours, avec les unités de protection électroniques et microproces- sées ,
cette compensation se fait par logiciel .
La
fonction de la protection est basée sur le rapport de transformation " n "
qui peut être exprimé par l'équation:
n = (U 1 / U 2 )
= (I 2 / I 1 )
( U 1 :
tension primaire, U 2 : tension
secondaire, I 1 : courant primaire, I 2 :
courant secondaire).
La
relation ci-dessus est une conséquence de l'équation de la puissancenominale ( S ) du
transformateur:
S = √3 x U 1 x
I 1 = √3 x U 2 x I 2
·
Problème relatif au
courant d'appel du transformateur
La commutation
du transformateur provoque un très fort courant transitoire
( de 8 à 15 I n ) qui ne traverse que
l'enroulement primaire et dure plusieurs dixièmes de seconde.
Il est ainsi
détecté par la protection comme un courant
différentiel et dure beaucoup plus longtemps que le temps de
fonctionnement de la protection ( 30 ms ). Une
détection basée uniquement sur la différence entre les courants primaire et
secondaire du transformateur entraînerait l' activation de la protection . Par
conséquent, la protection doit être capable de distinguer entre un
courant différentiel dû à un défaut et un courant d'appel différentiel .
L'expérience a montré que
l' onde de courant d'appel contient au moins 20%
de composantes de
second harmonique ,
alors que ce pourcentage n'est jamais supérieur à 5% lors
de l'apparition d'une surintensité due à un défaut à l'intérieur du
trans formateur.
La protection doit
donc être simplement verrouillée lorsque le pourcentage
de seconde composante harmonique par rapport à la composante
harmonique fondamentale ( 50 Hz ou 60 Hz ) est supérieur
à 15% , soit " I 2 / I 1 >
15% " .
·
Problème relatif au
courant magnétisant lors de l'apparition d'une surtension d'origine
externe
Le
courant de magnétisation , ou courant d'excitation , est
le courant qui circule dans l'enroulement primaire d'un transformateur
de puissance lorsqu'aucune charge n'est connectée à l'enroulement secondaire ; ce courant établit
le champ magnétiquedans le noyau et fournit de
l' énergie pour les pertes de puissance à vide dans le
noyau . Il est responsable des " pertes de fer ".
Le courant magnétisant constitue une
différence entre les courants primaire et secondaire du transformateur . Il
est donc détecté comme un courant de défaut par
la protection différentielle même s'il n'est pas dû à un
défaut .
En fonctionnement
normal , ce courant magnétisant est très
faible et n'atteint pas le seuil de protection .
Cependant,
lorsqu'une surtension survient à l'extérieur du transformateur ,
le matériau magnétique se sature (en général, les
transformateurs sont dimensionnés pour pouvoir fonctionner à la limite de
saturation pour la tension d'alimentation nominale), et la valeur
du courant magnétisant augmente considérablement . Le
seuil de fonctionnement de la protection peut donc être atteint .
L'expérience
a montré que le courant magnétisant dû à la saturation
magnétique a un taux élevé de composants de cinquième
harmonique .
La protection différentielle du transformateur nécessite
donc des fonctions assez complexes car elle doit pouvoir
mesurer les deuxième et cinquième courants harmoniques ou, pour éviter
de mesurer des courants de cinquième harmonique, elle doit pouvoir détecter
des surtensions d'origine externe .
Les
caractéristiques de la protection différentielle du transformateur sont liées
aux spécifications du transformateur :
·
Taux de transformation
·
Groupe de vecteur
·
Courant d'appel
·
Courant magnétisant permanent
Protection contre les
surcharges dans Transformer
Le
critère de base pour le chargement du transformateur est
la température du point le plus chaud de l'isolation solide (point chaud ). Il
doit pas dépasser la valeur prescrite , afin d'éviter
les défauts d'isolement , car l capacité de
oading des transformateurs de puissance est limitée principalement par
la température d' enroulement .
La
température de l'isolation solide est le principal facteur de vieillissement
des transformateurs.
Avec
la température et le temps , le isolation cellulosique subit
un processus de dépolymérisation . Lorsque la chaîne
de cellulose se raccourcit , les propriétés mécaniques du
papier telles que la résistance à la traction
et l'élasticité se dégradent. Finalement, le papier devient cassant et
n'est pas capable de supporter les forces de court-circuit et
même les vibrations normales qui font partie de la vie
du transformateur . Cette situation caractérise la fin de
vie de l' isolation solide et puisqu'elle n'est pas
réversible , elle définit également la fin de vie du transformateur.
Des
surcharges de transformateur peuvent se produire lors de conditions
de contingence qui sont le produit d' un, de deux ou de
plusieurs éléments du système isolés du système . Ils peuvent
également se produire lorsque les transformateurs sesituent déjà
entre 80% et 90% de leur indice nominal complet et qu'une
capacité supplémentaire est nécessaire , en particulier pendant les
étés chauds .
Traditionnellement,
les relais de surintensité à temps inverse ont été utilisés
pour la protection contre les surcharges , mais une difficulté
est que les transformateurs sont généralement à l'extérieur où la
température ambiante affecte leur capacité de charge , et donc
les réglages optimaux de ces relais.
Cependant,
pour les transformateurs de puissance immergés dans des liquides ,
la température du point chaud d'enroulement est le facteur
important dans la vie à long terme du transformateur .
La température
de l'huile isolante dépend de la température de l' enroulement et sert
à indiquer les conditions de fonctionnement du transformateur . De
nombreux relais numériques de protection de transformateur disponibles
aujourd'hui incluent des fonctions de protection qui fonctionnent sur
des températures d'huile isolantes, une perte de vie calculée due à une
température d'huile élevée et des températures d'huile prévues en raison de la
charge .
Ces
types de fonctions ne sont pas couramment utilisés ,
mais les pratiquesmodernes d'exploitation des services
publics tentent de maximiser l'utilisation des transformateurs
de puissance , ce qui peut augmenter l'apparition
de conditions de surchauffe et le vieillissement des
transformateurs . Les conditions de surchauffe et
le vieillissement accéléré sont des événements
indésirables qui doivent être identifiés et protégés .
Fonction
la plus commune prévue pour la protection thermique des
transformateurs de puissance est la surcharge thermique ( ANSI
/ IEEE / IEC 49 ) de fonction .
La capacité
thermique utilisée est calculée selon un modèle mathématique qui
prend en compte:
·
Température
ambiante
·
Courant
négatif de la séquence.
La
protection donne un tour de consigne lorsque la chaleur
augmente E , calculée en fonction de la mesure
d'un courant équivalent I eq , est supérieur
au point de consigne E s .
Le temps
de déclenchement de la protection est déterminée par la
constante de temps T .
La fonction
de protection contre les surcharges thermiques peut être utilisée pour
protéger les équipements à deux vitesses de fonctionnement ,
par exemple les transformateurs avec deux modes de ventilation , avec
ou sans ventilation forcée ( ONAN / ONAF - huile
naturel-air naturel / huile naturelle-air forcé ).
Protection contre les
surintensités à Transforemer
Les
transformateurs MT d' une
puissance nominale allant jusqu'à 2,5-3 MVA sont
généralement protégés uniquement contre les
surintensités à l' aide de relais à maximum
de courant - maximum de courant de phase instantanée
(50), à maximum de courant de terre instantanée (50N), le retard
de temps maximum de courant de phase (51) et à maximum
de courant de terre de temporisation (51N) .
Cet ensemble
de protections est utilisé sur les transformateurs HT et
les transformateurs MT avec une puissance nominale supérieure
à 3-4 MVA comme protection de secours , en plus de
la protection différentielle .
Dans
certaines installations et réseaux, les transformateurs MT / BT d'une
puissance nominale allant jusqu'à 630-1250 kVA peuvent être
protégés contre les surintensités par fusibles associés
à des interrupteurs-sectionneurs , comme le montre le Figure
17.
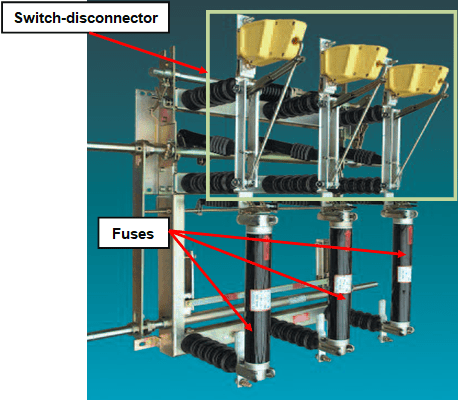
Figure 17 - Interrupteur-sectionneur MT associé à des
fusibles
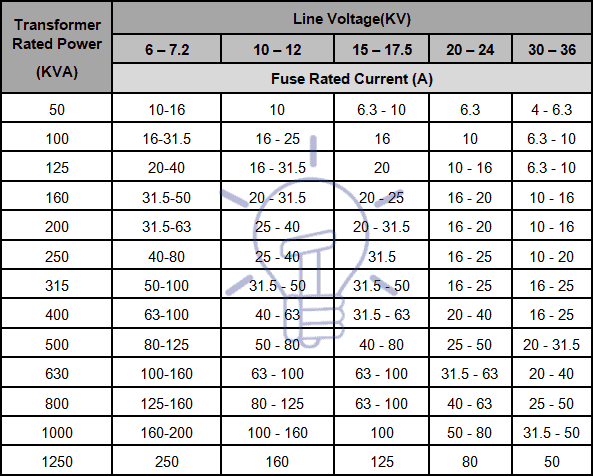
Pour la
protection des transformateurs de puissance, les fabricants fournissent
des tableaux permettant de choisir le courant nominal d'un fusible ,
en tenant comptetension et de la puissance assignées , comme
indiqué dans le Tableau 2, conformément aux normes CEI .
Les
tableaux varient d'un fabricant à l'autre, selon les normes utilisées, étant
recommandé d'utiliser le tableau fourni par le fabricant sélectionné.
Protection contre les
défauts de la terre restreinte
La
protection contre les défauts à la terre restreinte ( 64G /
64REF) est utilisée comme complément ou pour remplacer la
protection différentielle pour les défauts d'enroulement
phase-terre ; La figure 18 montre le schéma de cette protection.
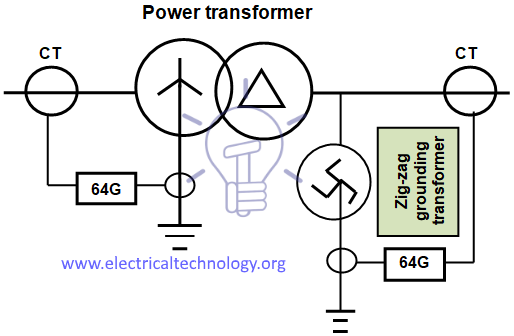
Figure 18 - Diagramme de protection contre les défauts
à la terre restreint du transformateur
Dans un
transformateur avec un enroulement en étoile , si un défaut
externe se produit, le courant traversant la phase défectueuse
est égal au courant traversant le conducteur neutre ; par
conséquent, le courant à travers la protection est zéro , ce
qui rend cette protection non sensible aux défauts externes au
transformateur .
Si
les charges sont déséquilibrées, la somme des trois
courants traversants n'est pas nulle et il y a un courant dans
le conducteur neutre , mais la somme de tous les courants ( phases
et neutre ) est nulle , donc cette protection n'est pas
sensible aux charges déséquilibrées .
Transformers
Système de protection incendie
Nous en
avons déjà discuté en détail dans notre article précédent " Transformers Fire Protection System - Causes, Types & Exigences ".
Protection du moteur
Pannes et défauts de
moteur communs
Il est
important de connaître et de comprendre les défaillances et défauts du
moteurpour définir les dispositifs de protection les mieux
adaptés à chaque cas . Vous devez également
connaître les termes importants liés au contrôle et à la protection
des moteurs. .
Les moteurs
de machines non statiques sont soumis à des
contraintes électriques et mécaniques .
Les
pannes de moteur sont
de trois types : électriques, mécaniques et mécaniques
qui progressent en électricité .
Les
pannes et les défauts courants du moteur sont:
·
Échec
de roulement
·
Panne
d'isolation
·
Rotor
bloqué
·
Surchauffe
·
Surcharge
(électrique et mécanique)
·
Le
déséquilibre de phase et tout déséquilibre de tension conduiront à un
déséquilibre de courant encore plus élevé.
·
Courir
en marche arrière
·
Désalignement
d'arbre
·
Vibration
Une
surchauffe peut
survenir en cas de sous-dimensionnement du moteur , de refroidissement
insuffisant à basse vitesse lors de l'utilisation de variateurs de
vitesse ( VSD ) , de modifications de la
charge sur le moteur telles qu'un équipement
bloqué et des conditions ambiantes chaudes .
Une
panne d'isolation ,
conduisant à des enroulements brûlés , implique
un court-circuit dans le moteur ou dans le circuit
d'alimentation du moteur , et peut être causée par une surchauffe,
des surcharges et des surtensions. .
Environ 80% des défaillances
du moteur électrique sont dues à des dommages d'enroulement
dans le stator du moteur et à des défauts de palier .
Une
défaillance des roulements sur les moteurs peut être une indication des roulements
incorrects pour l'application .
Un
moteur monté verticalement a besoin de roulements différents puis d'un moteur
monté horizontalement . Un moteur d' entraînement
d' une grande ou une unité multi-bande va nécessiter
des paliers qui manipulent de grandes charges radiales . Un moteur
boulonné à une plaque de base déformée se tord .
Les
roulements sont
généralement petits comparés aux autres composants
principaux du moteur , ce qui les rend particulièrement
vulnérables aux dommages et à l'usure ; Certaines études
imputent plus de la moitié de toutes les défaillances du moteur à un
dysfonctionnement du palier , dont la plupart résultent d'une
lubrification trop faible ou excessive . Une autre cause
importante de défaillancedes paliers est le défaut
d'alignement .
Mauvais
alignement des arbres se détruire roulements bien avant
leur vie de travail complète . L' arbre du moteur doit
être directement aligné avec l'arbre qu'il entraîne, ce qui ne
peut être réalisé que par des techniques d'alignement de
précision telles que le laser .
D'autres
problèmes pouvant
survenir avec les moteurs sont:
·
Entrée
d'eau et de poussière dans les bobines du stator ou dans le boîtier des bornes
entraînant des courts-circuits
·
Pieds
de moteur à pied souple boulonnés hors de niveau
·
Mauvais
montage du moteur ou type de boîtier
·
Déséquilibre
électrique ou mécanique
Le
bruit indique des
problèmes de moteur mais ne cause habituellement pas de
dommages . Le bruit , cependant, est généralement
accompagné de vibrations .
Les
vibrations peuvent causer
des dommages de plusieurs façons . Il tend à ébranler les
enroulements et endommage mécaniquement l'isolation en fissurant,
en écaillant ou en abrasant le matériau . La fragilisation des
fils de plomb résultant d'un mouvement excessif et de l'étincelage de la brosse
au niveau des commutateurs ou des bagues collectrices de courant résulte
également de la vibration.
Enfin,
les vibrations peuvent accélérer la défaillance des
paliers en faisant en sorte que les billes
"brinnell" des coussinets soient déformées ou
que les logements se desserrent dans les coquilles .
Chaque
fois qu'un bruit ou des vibrations sont détectés dans un
moteur en fonctionnement, la source doit être rapidement
isolée et corrigée .
Ce qui
semble être une source évidente de bruit ou de vibration peut être le symptôme
d'un problème caché. Par conséquent, une enquête approfondie est souvent
nécessaire.
Le
bruit et les vibrations peuvent être provoqués par un arbre de
moteur mal alignéou peuvent être transmis au moteur par
la machine entraînée ou le système de transmission de puissance . Ils
peuvent également être le résultat d' un déséquilibre électrique ou
mécanique dans le moteur .
Un
déséquilibre électrique se produit lorsque l' attraction
magnétique entre le stator et le rotor est inégale autour de
la périphérie du moteur . Cela fait fléchir l' arbre lorsqu'il
tourne, créant un déséquilibre mécanique . Un
déséquilibre électriqueindique généralement une défaillance
électrique telle qu'un enroulement de stator ou de
rotor ouvert , une barre ou un anneau ouvert dans des
moteurs à cage d'écureuil ou des bobines de champ court - circuitées dans des
moteurs synchrones. Un entrefer irrégulier, provenant généralement
de roulements à manchon mal usés, produit également un déséquilibre électrique .
Les
principales causes de déséquilibre mécanique comprennent
un montage déformé, un arbre coudé, un rotor mal équilibré, des pièces
détachées sur le rotor ou de mauvais roulements . Le bruit peut
également provenir du ventilateur qui heurte le cadre, le carénage ou
des corps étrangers à l'intérieur du carénage . Si les roulements
sont défectueux , comme indiqué par un bruit de roulement
excessif , il est nécessaire de déterminer pourquoi les
roulements ont échoué .
Un
autre problème auquel les moteurs peuvent faire face est une longue
période de démarrage . Si un moteur est soumis à de nombreux
démarrages successifs , les enroulements de rotor ou les
barres de rotor peuvent être chauffés jusqu'à un point où les
connexions électriques entre les barres de rotor et les bagues d'extrémité sont
endommagées .
Dispositifs de
protection du moteur
Peu
importe la tension et la taille des moteurs, ils sont protégés
contre les surintensités (court-circuit) et les surcharges .
Les
moteurs BT de petite et moyenne taille ne sont généralement protégés que contre
les surcharges et les courts-circuits, et les gros moteurs BT
et les moteurs MTont également d'autres protections .
Les
protections contre les surcharges et les surintensités doivent être
conçues pour être insensibles aux courants d'appel au démarrage ,
afin d' éviter une interruption de courant intempestive .
Pour
les moteurs BT la protection contre
les surintensités et les courts-circuits peut être réalisée
par des fusibles , associés à interrupteurs ou
instantanées des disjoncteurs de déclenchement qui répondent
aux immédiats ( quasi instantanée ) valeurs
de courant de court - circuit, défaut à la terre, ou le courant
de rotor bloqué .
Les
disjoncteurs à temps inverse ont des caractéristiques de
déclenchement thermique et instantané et sont préréglés pour
déclencher à des niveaux normalisés .
C'est
le type le plus commun de disjoncteur utilisé dans les métiers du bâtiment pour
la construction résidentielle, commerciale et lourde.
L' action
thermique de ce disjoncteur réagit à la chaleur . Si les
entrées et les sorties de ventilation d' un moteur ne sont pas
suffisantes pour dissiper la chaleur des enroulements du moteur,
la chaleur sera détectée par l' action thermique du disjoncteur .
Si
un court-circuit devait se produire, l' action
magnétique du disjoncteur détecterait les valeurs
instantanées du courant et déclencherait le disjoncteur .
Les
fusibles sont
généralement pas adaptés à la protection contre les surcharges ,
parce que si dimensionné pour assurer une protection
contre les surcharges , ils soufflaient lorsque le moteur
démarre en raison de courant élevé du moteur de démarrage , bien
qu'ils puissent être utilisés comme protection contre
les surcharges de sauvegarde .
La
protection avec des fusibles présente le risque
d'endommager le moteur en une seule phase lorsqu'un seul
fusible saute, sauf si une protection monophasée est fournie ; ce
sujet sera discuté plus tard dans ce chapitre.
Les
moteurs BT de grande taille et les moteurs MT sont protégés contre les courts-circuits ( phase-phase
et phase-terre ) par des relais de surintensité ( 50;
50N; 51; 51N ) connectés à CT .
La protection
contre les surcharges est normalement assurée par un relais de
surcharge thermique . Ce relais peut être des types suivants:
Bande
bi-métal
Une protection
contre les surcharges thermiques accueillera le court
courant de démarrage élevé d'un moteur tout en le protégeant
avec précision contre une surcharge de courant de
fonctionnement . La bobine de chauffage et
l' action de la bande bimétallique introduisent
une temporisation qui permet au moteur de démarrer et
de se stabiliser en courant de fonctionnement normal sans
déclenchement de surcharge thermique . Les protections contre
les surcharges thermiques peuvent être réinitialisées
manuellement ou automatiquement enfonction de leur application et réglées
avec précision sur le courant de fonctionnement du moteur . ajusteur qui
leur permet d'être
La
température ambiante dans
laquelle se trouve le démarreur et le moteur doit être
prise en compte lors de la sélection des
relais à bande bimétallique, car une température ambiante
élevée réduit le temps de déclenchement de la surcharge .
Un
temps de déclenchement de surcharge réduit peut entraîner un
déclenchement intempestif si un moteur se trouve à une température
ambiante plus froide que le démarreur et entraîne une usure du moteur lorsque
le moteur se trouve à une température ambiante plus élevée que le
démarreur .
La
plupart des dispositifs de surcharge thermique sont prévus
pour une utilisation à une température maximale de 40 ºC , et
un déclassement du relais peut être nécessaire .
La
plupart des relais sont réglables sur une plage de 85% à 115% de
leur valeur.
Certains
modèles sont disponibles avec compensation ambiante . Un point
de déclenchement des dispositifs à compensation ambiante n'est pas
affecté par la température ambiante et fonctionne de manière cohérente
avec la même valeur de courant.
Ce type
de relais est couramment utilisé sur les moteurs basse et moyenne
tension BT.
Les
normes et les données des fabricants indiquent généralement la consigne
de régulation recommandée pour ce type de relais en fonction de
la puissance nominale du moteur ; mêmes tables montrent
aussi des courants nominaux recommandés des fusibles (
de type aM ou gG - voir la section 2.4) et des
disjoncteurs instantanés qui sont associés aux relais de
protection contre les surtensions , comme indiqué dans
le tableau 3.
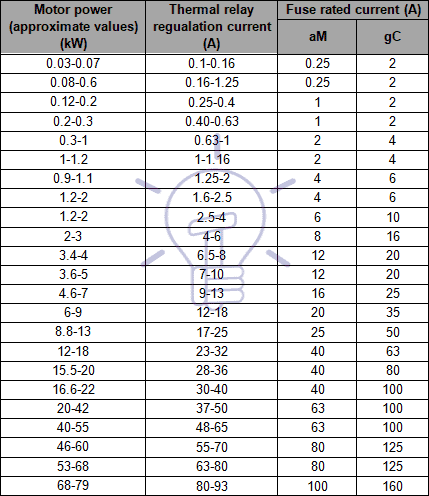
Relais électroniques
de surcharge numérique
Ce type
de protection est utilisé pour les gros moteurs BT et les moteurs HT ,
et contient un microprocesseur . Ces appareils peuvent
modéliser le chauffage des enroulements du moteur en surveillant le courant du
moteur et ils peuvent également inclure des fonctions de mesure et de
communication.
La
protection commune des gros moteurs BT et des moteurs MT est
généralement assurée par les dispositifs de protection suivants:
·
Protection
contre les surcharges: 49
·
Surintensité
de phase instantanée: 50
·
Surintensité
instantanée de la terre: 50N / 50G
·
Surintensité
de phase temporisée: 51
·
Surintensité
de terre de temporisation: 51N / 51G
Dans certaines
situations, il n'est pas recommandé de protéger les moteurs
contre les surcharges ; c'est le cas des pompes à eau
anti-incendie et des ventilateurs d'évacuation des fumées .
Les
très gros moteurs BT et les moteurs MT sont chers et il est
généralement judicieux de prévoir des systèmes de protection plus
complets . Ces systèmes comprennent:
·
Moniteurs
et protection de la température des paliers ( 38 )
·
Protection
différentielle ( 87M )
·
Séquence
de démarrage incomplète / longue durée de protection ( 66 )
·
Séquence
de phase négative ( protection contre l'inversion de phase )
·
Protection
contre la surchauffe
·
Déséquilibre
de phase ou protection contre les défaillances de phase ( 47 )
·
Stall
ou blocage de la protection du rotor
·
Protection
sous et surtension ( 27 et 59 ,
respectivement)
·
Moniteurs
de vibration et protection (39)
·
Moniteurs
de température d'enroulement et dispositifs de protection
La
protection différentielle est souvent fournie pour les moteurs de
taille moyenne et grande avec des tensions d'alimentation supérieures
à environ 4 kV , et les disjoncteurs
à déclenchement électrique ( déclencheur à émission
de courant ) . La protection différentielle fournit une
direction à grande vitesse et un dégagement des défauts sur les enroulements du
stator du moteur .
Lorsque
le système d'alimentation est solidement mis à la terre, la protection
différentielle détecte les défauts phase-phase et phase-terre .
Avec une
protection différentielle, le courant à chaque extrémité de
chaque enroulement est comparé pour déterminer quand une condition de défaut
existe .
Cette
fonction nécessite deux jeux de TC , l' un au début du
dispositif d'alimentation du moteur et l'autre au point étoile .
La fonction
de protection différentielle ne peut être utilisée que si
les deux côtés de chaque phase du stator sont sortis du moteur pour une
connexion externe de sorte quele courant de phase entrant et
sortant de chaque phase peut être mesuré . L' élément
différentiel soustrait le courant sortant de chaque phase du courant
entrant dans chaque phase et compare le résultat ou la différence avec
le niveau de prélèvement différentiel.
Si
cette différence est égale ou supérieure au niveau de détection, un
déclenchement se produira .
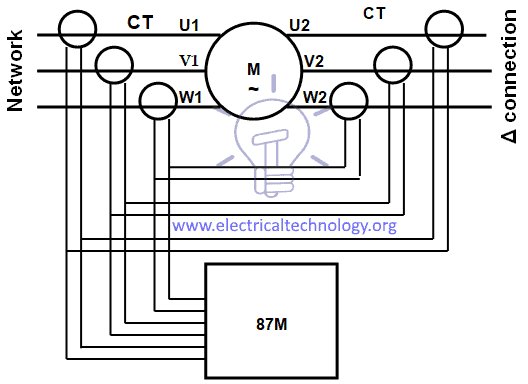
Figure 19 - Protection différentielle du moteur
En
utilisant six TC dans une configuration de sommation , pendant
le démarrage du moteur, les valeurs des deux TC sur chaque phase peuvent ne pas
être égalescar les CT ne sont pas
parfaitement identiques et des courants asymétriquespeuvent
provoquer des sorties différentes du TC sur chaque
phase .
Pour
éviter les déclenchements intempestifs dans cette
configuration, il peut être nécessaire de régler le niveau
différentiel moins sensible , ou le différentiel
temporisépeut être étendu à rouler à travers la période de
problème pendant le démarrage du moteur .
Le délai
différentiel de fonctionnement peut ensuite être ajusté à
une application de telle sorte qu'il réagisse très rapidement et
soit sensible aux faibles niveaux de courant différentiel .
La protection
contre la surchauffe des enroulements est généralement
effectuée avec des détecteurs de température à résistance ( RTD ) et
des dispositifs de thermistanceet d'arrêt automatique peuvent
être installés. La fixation d'un ventilateur d'appoint séparé pour
aider le ventilateur du moteur résout le
problème de surchauffe lorsqu'un VSD est utilisé
pour contrôler le moteur .
Séquence
de démarrage incomplète / longue durée de démarrage entraîne une surchauffe du
rotor .
Comme
il n'est pas possible de mesurer physiquement la chaleur du rotor sur
des moteurs à cage d'écureuil, il est nécessaire de déterminer
la chaleur en mesurant le courant que le rotor tire à
travers le stator pour exciter le rotor. Une réplique
thermique du rotor est établie en utilisant une courbe I 2 t .
L' interdiction
de redémarrage se bloquer à l'utilisateur de démarrer le
moteur si le relais a déterminé que le rotor
a atteint une température qui va endommager le rotor doit
commencer être tentée . Le relais permettra donc seulement
un redémarrage si le rotor dispose d'une réserve thermique
suffisante pour démarrer .
La
protection des paliers est généralement réalisée par RTD et
t hermistor pour surveiller la température .
La
protection contre les vibrations utilise des capteurs /
accéléromètresgénéralement placés aux endroits clés du moteur et
des roulements .
Étant
donné que les roulements sont la partie portante de la chaîne
de traction mécanique, les accéléromètres doivent être placés
à l'entrée et à la sortie.
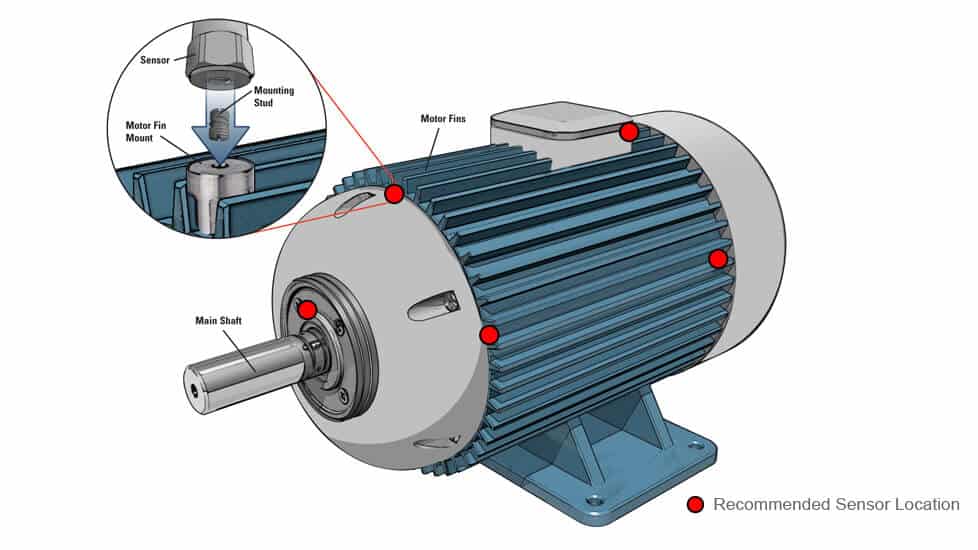
Figure 20 - Capteurs de vibrations du moteur
De nos
jours, les DEI (voir la section 2.1) regroupant toutes
les fonctions de protection requises sont couramment utilisés pour
les gros moteurs BT et les moteurs MT .
Protection de
générateur
Erreurs de générateur
communes
Les
fautes du générateur sont
généralement classées en défauts internes et externes ; les
défauts internes sont dus à des problèmes dans les composants
du générateur et les défauts externes sont dus
à des conditions de fonctionnement anormales et à des défauts sur les
réseaux externes .
Les
défauts sur
le moteur principal [7] et les
systèmes associés ne seront pas discutés car ils sont généralement
définis au stade de la conception mécanique de
l'équipement.
Cependant,
ils doivent être intégrés dans les protections du générateur à des fins de
déclenchement.
Les
défauts internes peuvent être électriques ou mécaniques
1. Défauts
du stator
·
Les
enroulements surchauffent
·
Bobine
défaut phase-phase
·
Enroulement
phase-terre
·
Défaut
inter-tour
2.
Les défauts du rotor
·
faille
terrestre
·
Court-circuit
d' enroulement ( rotor enroulé )
·
Surchauffe
3. Perte
de champ / excitation [8]
4. Générateur
déphasé
5. fonctionnement
du moteur
6. Surchauffe
des roulements et manque de pression de l'huile de lubrification
7. Vibration
Des
enroulements de stator surchauffe peuvent être provoqués par les surcharges
permanentes et phase-phase et des défauts de terre sont
dus à une rupture d'isolation .
Le
court-circuit de l'enroulement du rotor entraîne une augmentation du
courant d'excitation et une diminution de la tension d'excitation .
La
surchauffe du rotor est
une conséquence des courants déséquilibrés sur le stator dus
à:
·
Voyage
unipolaire
·
Défaut
d'enroulement du stator
·
Séquence
de phase négative
Une séquence
de phase négative et des courants déséquilibrés dans les courants du stator produisent
un flux d'induit tournant dans la direction opposée au
rotor , induisant des courants de Foucault dans la masse du
rotor .
Ces courants
de Foucault , qui sont à deux fois la fréquence du système ( 50
Hz ou 60 Hz ), provoqueront une surchauffe locale à la
périphérie du rotor, ce qui pourrait entraîner une faiblesse
des cales et des anneaux de retenue du rotor .
Lorsqu'un
générateur perd son excitation (ou son champ ), la puissance
réactivepasse du système d'alimentation au générateur . Le
générateur perd alors son synchronisme et fonctionne
comme un générateur d'induction, au-dessus de la vitesse synchrone .
Au-dessus
de la vitesse synchrone, le rotor commence à osciller
pour tenter de se synchroniser , ce qui entraîne une surchauffe
et d'autres dommages . Tant que le système est stable , la
puissance réactive ( MVAr ) s'écoulera dans le
générateur et la machine continuera à éteindre la puissance active ( MW ).
Le
fonctionnement du moteur des générateurs peut se produire lorsque l' alimentation
en vapeur ou en eau de la turbine tombe en panne et que
les générateurs sont alimentés par le système électrique .
Dans les
turbines à vapeur, la vapeur agit comme un liquide de
refroidissement , en maintenant les aubes à une température
constante . Une panne de l'alimentation en vapeur peut
provoquer une surchauffe des lames . Sur certaines
machines, la hausse de température est très faible et l' automobile peut
être tolérée pendant un temps considérable .
La
turbine hydraulique aura
une cavitation ( formation puis implosion immédiate
des cavités dans le liquide - petites zones sans liquide (« bulles »)
- qui sont la conséquence des forces agissant sur le liquide ).
Cela se
produit habituellement lorsqu'un liquide est soumis à des changements
rapides de pression qui provoquent la formation de cavités où
la pression est relativement faible .
La
cavitation est
une cause importante d'usure . Lors de
l'entrée dans des zones à haute pression , les bulles
de cavitation qui implosent sur une surface métalliqueprovoquent une contrainte
cyclique par implosion répétée , entraînant une fatigue de
surface du métal .
Les
défauts du système d'alimentation externe et les conditions de fonctionnement
anormales sont:
·
Défauts
externes de court-circuit
·
Connexion
non synchronisée du générateur
·
Pas-de-pas
(glissement de poteau ou perte de synchronisation)
·
Surcharges
·
Survitesse
·
Déséquilibre
de phase et séquence de phase négative
·
Sous et
sur fréquence
·
Sous et
sur les tensions
Un défaut
de compensation défrichées ou lent sur le système de réseau peut
provoquer des générateurs de départ pôles
de glisser , ou aller « hors étape » avec
le reste du système .
Une
telle condition est indésirable car des
contraintes mécaniques nuisibles sont exercées sur l'arbre , et
les fortes oscillations de puissance ont un effet
perturbateur sur les tensions du système d'alimentation .
Un
défaut de synchronisme peut être provoqué par un court-circuit
externe, la coupure d'une charge inductive importante ou par un défaut au
niveau du système d'excitation .
La
survitesse est
la conséquence d'une coupure soudaine de la charge totale ou
d'une réduction importante de la charge .
Dispositifs de
protection de générateur
Les
génératrices sont les pièces d'équipement les plus chères des systèmes
électriques.
Des
systèmes de relais de protection fiables sont donc nécessaires pour détecter
et éliminer rapidement les défauts du générateur afin de minimiser
les dommages et de réduire le temps de réparation au minimum .
La
protection contre les défauts phase-phase des enroulements du stator est
réalisée par l'intermédiaire d'un relais différentiel ,
principe déjà discuté dans d'autres sections. Ce dispositif de
protection n'est pas capable de détecter les défauts
d'enroulement d'enroulement .
Quand
un tel type de défaut se produit , la tension de phase
diminue et une tension homopolaire apparaît ; cette tension est
détectée par un relais de tension ( code ANSI / IEEE /
IEC 60 ) connecté à VT .
La protection
contre les défauts à la terre du stator dépend de
la mise à la terre du stator .
Pour
le système de mise à la terre de résistance, un relais
de surintensité est connecté à un TC de type «anneau» dans
la connexion de neutre ou à un relais de tension aux bornes
de résistance peut être utilisé.
Dans des
conditions normales et saines, aucun courant ne traverse la
résistance et la tension aux bornes est égale
à zéro .
Pour
la mise à la terre à travers un transformateur, un relais
de tension vérifiant la tension à la résistance connectée au
secondaire du transformateur est utilisé.
Dans des
conditions de santé normales, le transformateur de mise à la masse nedéveloppe aucune
tension secondaire et aucune tension n'est appliquée au relais . Lorsqu'un défaut
à la terre du stator se produit , une tension est développée
aux bornes secondaires du transformateur de mise à la terre et
le relais de tension fonctionne. .
La
figure 21 montre une connexion type pour le différentiel du stator et
la protection contre les défauts à la terre.
Figure
21 - Protections contre les défauts à la terre du différentiel et du stator
Les
défauts de court-circuit de l'enroulement du rotor de la plaie sont protégés
par des relais de surintensité .
Les
enroulements du rotor peuvent être endommagés par des défauts à la terre.
Le rotor
ou l'enroulement de champ sur les grands générateurs
thermiques n'est pas mis à la terre , donc un seul
défaut à la terre ne produit aucun courant de défaut .
Un seul
défaut à la terre augmente cependant le potentiel
de l'ensemble du champ et du système d'excitation , et les tensions supplémentaires induites
par l'ouverture du disjoncteur principal ou du disjoncteur principal ,
en particulier dans des conditions de défaut , peuvent augmenter
la contrainte sur le terrain , lorsque les transitoires du stator induisent une tension supplémentaire dans
les enroulements de champ . Cette tension supplémentaire peut
provoquer un deuxième défaut sur l'enroulement de champ .
Un second
défaut à groun d peut provoquer un échauffement local du
fer qui pourrait fausser le rotor, ce qui provoque
un déséquilibre dangereux.
La protection
contre les défauts à la terre du rotor peut être assurée par un relais
qui commande l'isolation du rotor en appliquant une tension alternative
auxiliaire au rotor ou un relais de tension en série avec une
résistance élevée ( combinaison de résistances linéaires et non linéaires). méthode
courante utilisée de nos jours ) connectée à travers le circuit du rotor ,
dont le point central est relié à la masse à travers la bobine
d'un relais sensible ( code ANSI / IEEE / IEC 64).
De nos
jours, la technique moderne nécessite l'utilisation de résistances linéaires
et non linéaires .
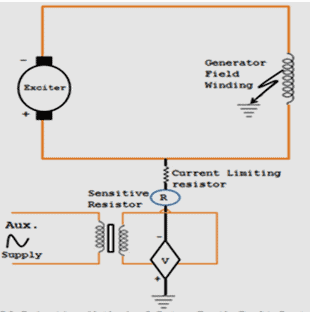
Figure 22 - Protection du rotor contre les défauts à
la terre
La
protection contre la perte de champ utilise un relais qui
détecte la variation du flux de puissance réactive. Une
caractéristique perte de la protection d'excitationsystème
utilise un mho Offset ( impédance ) relais pour
mesurer l' impédance de charge du générateur .
Le relais
d'impédance Offset Mho est un relais monophasé ,
fourni par le générateur CT et VT . La perte
du relais de champ fonctionnera si la valeur de l'impédance de
charge tombe dans les limites de la caractéristique de fonctionnement du relais .
Un relais
de temporisation est inclus pour déclencher le déclenchement de
la machine si la condition de puissance réactive principale persiste
pendant 1 s ( typique ).
Pour
éviter la saturation du cœur due à une surexcitation pendant
l' exécution et l'arrêt, une protection contre la
surexcitation ( code ANSI / IEEE / IEC 59) est
utilisée.
La
surexcitation peut
être expliquée par l'équation suivante:
B = V /
f
Où B
est la densité de flux magnétique ou induction
magnétique ou flux de noyau (unité: tesla - T ), V est
la tension appliquée (unité: volt - V )
et f la fréquence (unité: hetz - Hz ).
Pour
que le flux de cœur reste en dessous du point de
saturation , la tension du générateur ne peut être
augmentée que lorsque la fréquence (ou la vitesse) augmente .
Si
l' excitation est augmentée trop rapidement ,
cette condition de surexcitation doit être détectée ,
et le disjoncteur de champ déclenché .
Les systèmes de
protection contre la surexcitation utilisent des relais Volts
par Hertz .
Ces
relais ont une caractéristique linéaire et fonctionneront si
la tension divisée par la fréquence dépasse la valeur définie .
Les
enroulements du stator et la protection contre la surchauffe des paliers sont
généralement effectués par RTD et t hermistor pour surveiller
la température .
La
protection contre les déséquilibres de phase du stator utilise
couramment un relais de surintensité temporisée inverse , qui
est réglé en fonction de la durée maximale
pendant laquelle le rotor peut supporter cette surchauffe .
La
fonction de protection de la séquence de phase négative du
générateur est de protéger la machine contre les effets de surchauffe ,
à savoir au niveau du rotor , qui résultent d'un déséquilibre
des courants de phase du stator .
Cette protection utilise
un relais qui compare le courant à deux phases à
travers CT , comme le montre la figure 23.
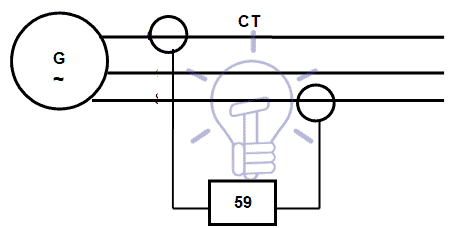
Figure 23 - Protection de la séquence de phase
négative
Les
protections sont réglées en
fonction du temps maximum que le rotor peut supporter cette surchauffe et
le temps est défini par l'équation K = I 2 t (basée
sur la loi Joule ).
Les
courbes typiques pour
cette condition sont montrées dépendent du moteur d'entraînement et
sont indiquées par le fabricant .
La
protection contre les inversions de courant ( code ANSI / IEEE
/ IEC 32) utilise un relais directionnel de puissance pour surveiller la charge du générateur ; le relais est
alimenté par le générateur CT et VT comme indiqué sur la
figure 24 et fonctionne lorsqu'un flux de puissance
négatif est détecté .
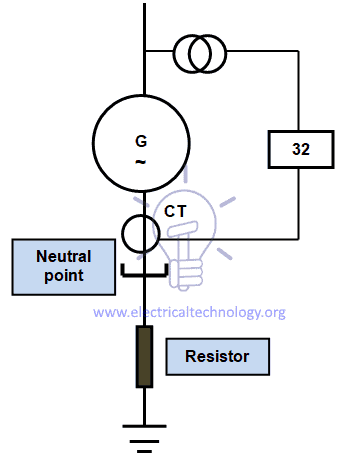
Figure 24 - Protection de l'alimentation inverse
La
protection anti-pas détecte
une condition causée par des perturbations du système
d'alimentation, plutôt que par des défauts du générateur . La protectiondétecte
la condition lorsque le générateur glisse son premier pôle et
provoque le déclenchement des disjoncteurs du générateur .
La turbine n'est pas
déclenchée, ce qui permet de resynchroniser la
machine une fois la perturbation du système
effacée .
Cette
protection peut être considérée comme complémentaire de la protection contre la
perte d'excitation.
La condition
de décalage se produit avec le générateur à plein
champ et la perte de synchronisme due à la sous-excitation se
produit lorsque le générateur n'a pas de champ .
La
protection anti-pas utilise trois
relais de mesure d'impédance . Ces relais sont
fournis par le générateur CT et VT et mesurent l' impédance
de charge du générateur, détectant une condition
d'oscillation de puissance si les trois relais fonctionnent
dans la séquence correcte et déclencheront le déclenchement
des disjoncteurs HT.
Pour les
défauts de court-circuit externes, les relais de surintensité sont
utilisés ( 50; 50N; 51; 51N ).
La
protection contre les sur et sous-fréquences ( code ANSI / IEEE / IEC 81 )
détecte également les perturbations du système, plutôt que les défauts
du générateur. Une rupture majeure du système d'alimentation peut
entraîner une puissance de production excessive ou insuffisante pour
la charge connectée restante .
Dans
le premier cas , la surfréquence , avec
des surtensions possibles en raison de la demande
de charge réduite . Le fonctionnement dans ce mode ne
produira pas de surchauffe à moins que la puissance
nominale et la tension nominale d' environ 105% ne soient dépassées .
Les
commandes du générateur doivent être ajustées rapidement pour correspondre à la
sortie du générateur à la demande de charge .
Avec une
production insuffisante pour la charge connectée , la
sous- fréquence est le résultat d'une forte demande de
charge .
La chute
de tension entraîne le régulateur de tension pour augmenter
l' excitation . Le résultat est que la surchauffe peut
se produire à la fois dans le rotor et le stator . Dans
le même temps , plus de puissance est demandée ,
le générateur étant moins en mesure de l'alimenter à la fréquence
décroissante .
Le
délestage du système de transmission automatique ou manuel doit idéalement
ajuster la charge pour qu'elle corresponde à la production connectée avant
qu'un effondrement total du système d'alimentation ne se produise.
Les relais
de surtension et de sous-tension ( codes ANSI / IEEE / IEC 59
et 27 ) sont utilisés pour contrôler la tension .
La
protection de démarrage supplémentaire de phase est fournie pour
détecter une condition où un défaut existe s
lorsque le générateur est en cours d'exécution pour accélérer . Les
générateurs ne doivent bien sûr pas être mis en marche dans une charge ou dans
une condition de défaut.
Pour
éviter cela, un système de protections est utilisé qui
met en service des relais de surintensité à bas régime. UNIQUEMENT
des bas seuil si la fréquence est inférieure
à 52 Hz sur les systèmes d'alimentation 60 Hz et 42
Hz sur les systèmes 50 Hz .
De nos
jours, les DEI (voir la section 2.1) regroupant toutes
les fonctions de protection requises sont couramment utilisés pour
la protection des générateurs .
Protection divers
Protection de tension
et de fréquence
Les
fluctuations de charge et les défaillances des commutateurs et des centrales
électriques peuvent
entraîner des variations de tension et de fréquence du réseau
qui peuvent dépasser les limites acceptées de fonctionnement des
équipements et des réseaux .
Cette
situation peut entraîner des dommages sur les équipements et une panne
partielle ou totale du réseau.
Pour éviter
ou minimiser cette situation sous et surtension ( codes
27 et 59, respectivement ) et fréquence ( codes
81U et 81O, respectivement ), des protectionsdoivent être
utilisées.
Protection de barre
d'autobus
Dans les
sous - stations HT, il est courant d'installer
un relais de protection de barre omnibus , étant le plus
utilisé la protection différentielle ( 87B ).
Ce relais est
connecté à tous TC de la sous-station pour évaluer la
somme des courants entrants et sortants , comme le montre la figure
25.
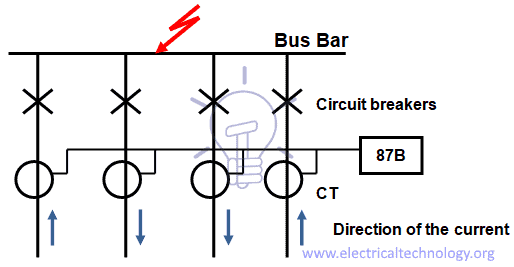
Figure 25 - Diagramme de protection différentielle de
barre omnibus
Le
principe de fonctionnement de cette protection est basé sur les lois de
Kirchhof - loi actuelle .
Le CT
de protection du bus doit être situé du côté de
l'alimentation des disjoncteurs. Si le CT de protection du bus est
situé sur le côté bus du disjoncteur , il existe alors
un angle mort de protection .
En
utilisant des relais à haute impédance dans la
protection différentielle, le système peut être conçu pour être plus
tolérant à un CT saturé .
Une résistance
non linéaire est connectée à travers les bornes du relais pour limiter
la tension à travers le relais différentiel à un valeur sûre pendant
les conditions de défaut .
Les
relais à haute impédance sont largement utilisés dans la
protection différentielle moderne pour les bus haute tension .
L' avantage d'utiliser
des relais à haute impédance dans les protections différentielles de
bus est qu'ils peuvent être conçus pour rester stables ( ne
pas fonctionner ) pour des défauts externes , quand
l'un des CT est saturé .
Pour
un défaut externe , le pire des cas est
avec un CT complètement saturé et l'autre CT non saturé . Le courant
différentiel résultant provoquera la tension maximale à
travers le relais différentiel . Un réglage de relais (en volts )
est choisi, avec une marge suffisante , pour garantir que
la protection différentielle ne fonctionne pas pour cette condition de
défaut externe .
La résistance
des enroulements secondaires et du câblage du TC doit être
connue et utilisée dans les calculs de
réglage du relais .
Pour les
défauts internes, la haute impédance du relais différentiel
force une grande partie du courant différentiel résultant à travers
les impédances d'excitation CT . La tension
résultante développée aux bornes du relais est essentiellement
la tension en circuit ouvert du TC , et sera bien
au-dessus du réglage de tension du relais . Une résistance ou varistance non
linéaire est connectée aux bornes du relais pour limiter
la tension à une valeur sûre en cas de défaut.
Lorsqu'un défaut
de bus est détecté, tous les disjoncteurs de ce bus sont déclenchés . Les
défauts de bus sont presque toujours permanents, plutôt
que des défauts transitoires .
Il ne
doit donc pas y avoir de réenclenchement automatique des disjoncteurs
après un défaut de bus. Protections de bus seront annuler
souvent l'auto-refermeture sur tout disjoncteur qui peut avoir
été initiée par une autre protection .
De
nombreuses sous-stations utilisent des agencements de barre omnibus tels
que la barre de bus double , comme le montre la Figure 26, où
les départs peuvent être commutés d'un bus à l'autre au moyen
d'interrupteurs d'isolement .
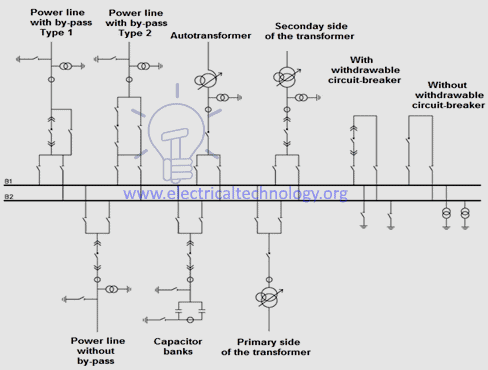
Figure 26 - Agencement de barre de bus double
Cela complique quelque
peu la protection du bus , car les circuits
secondaires du TC doivent être commutés , au moyen du interrupteurs
auxiliaires isolateur , pour correspondre au bus approprié.
Il est
habituel d'avoir une zone de protection pour chaque section du bus . Ceux-ci
sont connus comme zones discriminantes .
Il
existe également une autre zone de protection différentielle pour
l' ensemble de la sous - station , connue
sous le nom de zone de contrôle .
Pour
que le déclenchement d'un bus ait lieu avec cette disposition, il
est nécessaire à la fois de faire fonctionner un relais de zone de
discrimination et le relais de zone de contrôle .
Protection contre
l'échec du disjoncteur
Dans les
sous - stations HT, l'utilisation d' une
protection contre les défaillances de disjoncteur ( 50BF )
est fréquente , si un disjoncteur ne se déclenche pas
par un ordre de déclenchement , détecté par la non-extinction
du courant de défaut , cette protection envoie
une commande de déclenchement au disjoncteur. briseurs
en amont ou adjacents .
La fonction
de protection contre les défaillances du disjoncteur est activée
par un signal binaire 0/1 reçu des fonctions
de protection contre les surintensités ( 50/51,
50N / 51N, 46, 67N, 67 ). Il vérifie la disparition du
courant pendant l' intervalle de temps spécifié par le délai T .
On peut
également prendre en compte la position du disjoncteur , lire
sur les entrées logiques pour déterminer l' ouverture réelle
du disjoncteur . Le câblage d'un contact de position de
disjoncteur fermé sans tension sur l' entrée de l'éditeur
d'équation fermée du disjoncteur peut garantir
que la protection est effective dans les situations suivantes:
·
Lorsque 50BF est
activé par la fonction de protection 50N / 51N ( consigne
I s0 <0,2 I n ), la détection
de la consigne de courant 50BF peut éventuellement ne pas être
opérationnelle .
·
Lorsque
la surveillance du circuit de déclenchement ( TCS )
est utilisée, le contact du disjoncteur fermé est court-circuité .
L'activation
automatique de cette fonction de protection nécessite l'utilisation de la fonction
de commande du disjoncteur logique . Une entrée
spécifique peut également être utilisée pour activer la
protection à partir de l'éditeur d'équations . Cette option est utile pour
ajouter des cas spéciaux d'activation (par exemple déclenchement par
une unité de protection externe ).
La
sortie temporisée de l'unité de protection doit être affectée à une sortie
logique via la matrice de contrôle.
Le démarrage
et l' arrêt de la temporisation T counte r
sont conditionnées par la présence d'un courant au- dessus
du point de consigne ( I> I s ).
Faible fin
d'alimentation
Une
protection d'entrée d'extrémité faible est un complément à la
protection de distance utilisée si la valeur du courant de
défaut dans la ligne aérienne est inférieure à la régulation du point de
consigne de la protection de distance .
Protection des banques
de condensateurs
Quand
il s'agit de facteur de puissance , chaque
phase d'une batterie de condensateurs est formée
par des groupes de condensateurs en association sériepour l' amélioration du
facteur de puissance . Les 3 phases sont
alors connectées en étoile , étant le point
neutre isolé ou mis à la terre , en
fonction du fonctionnement du réseau , comme le montre la
figure 27.
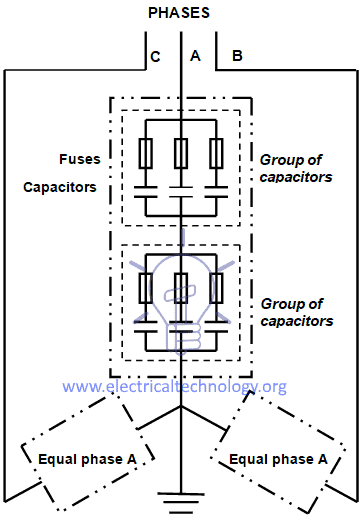
Figure 27 - Schéma d'une batterie de condensateurs
Les
défauts courants des banques de condensateurs sont:
·
Condensateurs
court-circuités ou défaut dans les câbles de connexion.
·
Court-circuit
entre les unités et la structure métallique des racks ou tableaux de
distribution (défaut phase-terre).
·
Les
surcharges causées par les harmoniques du réseau.
Lorsqu'un groupe
de condensateurs tombe en panne et que le neutre est mis à la terre, la banque sera
déséquilibrée et un courant circulera dans le neutre .
Chaque
condensateur ou groupe de condensateurs est généralement protégé par
des fusibles déjà installés par le constructeur.
Fusibles doit avoir
un I 2 caractéristique de t qui ne
provoquera pas le fusible à souffler le courant d'appel résultant de la connexion
de la batterie de condensateurs .
Les
dispositifs de protection communs des batteries de condensateurs sont:
·
Surintensité
de phase instantanée ( 50 )
·
Surintensité
instantanée de la terre ( 50N / 50G )
·
Surintensité
de phase temporisée ( 51 )
·
Surintensité
de terre à temporisation ( 51N / 51G )
·
Protection
contre les surtensions ( 49 )
[1] HV : Haute
tension ( V ≥ 60 kV ); MV : Moyenne
tension ( 1 kV <V <60 kV ); BT : Basse
tension ( V ≤ 1 kV ).
[3] IEEE :
Institut des ingénieurs électriciens et électroniciens. ANSI :
American National Standards Institute.
[4] Le courant
capacitif résiduel dans le cas d'un défaut phase-terre ( I C)
est calculé par l'équation I C = 3X c U ,
où X c est la réactance capacitive du
câble et U la phase-phase tension du réseau.
[7] Le moteur principal est le composant
qui est utilisé pour conduire le générateur et peut être des
moteurs à combustion (le cas des groupes électrogènes diesel), des turbines à
gaz, des turbines à vapeur, des éoliennes et des turbines hydrauliques.
[8] Le champ d'un générateur
CA est constitué de bobines de conducteurs dans le générateur qui
reçoivent une tension d'une source (appelée excitation ) et
produisent un flux magnétique .
Le flux
magnétique dans le champ coupe l' induit pour
produire une tension . Cette tension est finalement
la tension de sortie du générateur .
A
propos de l'auteur: Manuel Bolotinha
-Maîtrise en Génie Électrique - Energie et
Systèmes Electriques (1974 - Institut Supérieur Technique / Université de
Lisbonne)
- Master en Génie Electrique et Informatique (2017 - Faculdade de Ciências e Tecnologia / Université Nova de Lisbonne)
- Consultant Senior en Substation et Systèmes d'alimentation; Instructeur professionnel
- Master en Génie Electrique et Informatique (2017 - Faculdade de Ciências e Tecnologia / Université Nova de Lisbonne)
- Consultant Senior en Substation et Systèmes d'alimentation; Instructeur professionnel
source: Electrical Technology



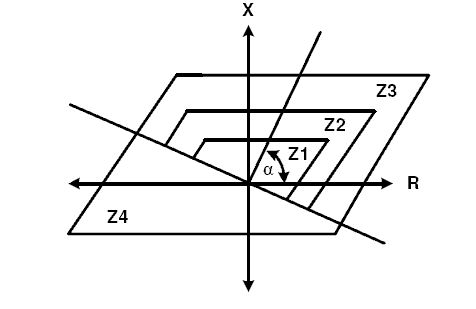{kind=link}
Aucun commentaire:
Enregistrer un commentaire